
HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达3mm;
模块包括超声波发射器、接收器与控制电路。
在智能小车的测距、避障,盲人拐杖,视力保护器(坐姿矫正),倒车雷达等应用中时常使用。
工作原理
HC-SR04基本工作原理:
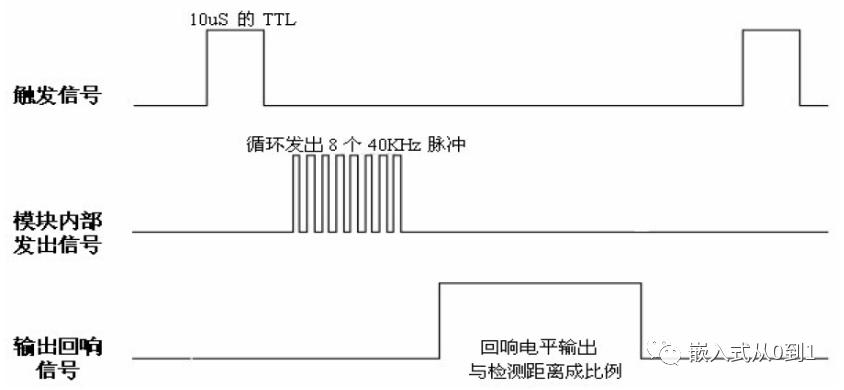
使用单片机的一个引脚发送一个至少10us高电平的TTL脉冲信号到模块的Trig引脚,用于触发模块工作。
模块检测到触发信号之后,会自动发送8个40khz的方波,然后自动切换至监测模式,监测是否有信号返回(超声波信号遇障碍物会返回)。
如果有信号返回,通过模块的Echo引脚会输出一个高电平, 高电平持续的时间就是超声波从发射到返回的时间。
因为声音在空气中的速度为340米/秒,即可计算出所测的距离。
代码实现
通过上面的分析,我们知道,获得超声波模块测得的距离的难点就是求得Echo引脚输出脉冲的高电平持续时间。
实现步骤:
初始化Trig引脚PA2为输出模式,Echo引脚PA3为浮空输入模式; 初始化TIM4为1ms的定时器,msHcCount变量用于记录定时器中断次数。
//文件"sr04.h"中添加定义extern u32 msHcCount;//超声波硬件接口定义//文件"sr04.c"中void Hcsr04Init(){TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(HCSR04_CLK, ENABLE);GPIO_InitStructure.GPIO_Pin =HCSR04_TRIG;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(HCSR04_PORT, &GPIO_InitStructure);GPIO_ResetBits(HCSR04_PORT,HCSR04_TRIG);GPIO_InitStructure.GPIO_Pin = HCSR04_ECHO;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(HCSR04_PORT, &GPIO_InitStructure);GPIO_ResetBits(HCSR04_PORT,HCSR04_ECHO);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);TIM_DeInit(TIM4);TIM_TimeBaseStructure.TIM_Period = (1000-1);TIM_TimeBaseStructure.TIM_Prescaler =(72-1);TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);TIM_ClearFlag(TIM4, TIM_FLAG_Update);TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE);Hcsr04_NVIC();TIM_Cmd(TIM4,DISABLE);}
测量距离,下面代码实现的是五次测量取平均值作为最终的结果。 单次距离测量的方法采用了两种实现方式:定时器方式和延时函数的方式。
定时器方式,通过定时器4计数器值计算距离
当ECHO_Reci引脚的输入电平由低变高时:即while(ECHO_Reci == 0); 循环为假时开始计时:OpenTimerForHc();
当ECHO_Reci引脚的输入电平由高变低时,即while(ECHO_Reci == 1); 循环为假时结束计时:CloseTimerForHc();
计时结束,调用GetEchoTimer(void)函数计算总耗时,单位us。
u32 GetEchoTimer(void){u32 t = 0;t = msHcCount*1000;t += TIM_GetCounter(TIM4);= 0;delay_ms(50);return t;}
通过定时器4计数器值计算距离的具体实现代码如下所示:
float Hcsr04GetLength(void ){u32 t = 0;int i = 0;float lengthTemp = 0;float sum = 0;while(i<5){TRIG_Send = 1;delay_us(20);TRIG_Send = 0;while(ECHO_Reci == 0);OpenTimerForHc();i = i + 1;while(ECHO_Reci == 1);CloseTimerForHc();t = GetEchoTimer();lengthTemp = ((float)t/58.0);sum = lengthTemp + sum ;}lengthTemp = sum/5.0;return lengthTemp;}
延时函数方式计算距离
也是取五次测量值的平均值作为结果,在计算Echo引脚输出高电平时间的时候,只要while(ECHO_Reci)为真,计时即+10us,直至高电平结束,即可获得高电平持续的总时间。
测试结果部分可以看出此方法误差较大,大家可以想想,问题出在哪里?
void HCSR04_Ranging(float *p){u8 i=0;u32 j=0;float HCSR04_Temp = 0.0;for(i=0;i<5;i++){TRIG_Send=1;delay_us(40);TRIG_Send=0;while(!ECHO_Reci);while(ECHO_Reci){delay_us(10);j++;}HCSR04_Temp+=j*10; //模块最大可测距4mj=0;delay_ms(60);//防止发射信号对回响信号的影响}*p= HCSR04_Temp/5/58.0;}
注意:文中多次使用类似while循环:while(ECHO_Reci),其实这样做容易让单片机陷入死循环,各位可以试着想想有没有好的方式避免。
距离换算
查看手册,我们会看到,手册上说:
测量距离(cm) = 高电平持续的us数 / 58
为什么us值/58即是以cm为单位的距离值呢?
正常的换算公式为:
测试距离 = (高电平时间*声速(340m/s))/2
除以2的原因是,超声波的信号是往返的耗时等于高电平时间,我们求距离,需要除以2。
上面的测量距离单位为m,高电平时间为s, 如果我们把测量距离的单位换为cm,高电平时间改为us, 则上面的公式就修改为:
测量距离cm = (高电平时间us/1000000) * 340 / 2 * 100
即测量距离cm = 高电平时间us * 17 / 1000;
即测量距离cm = 高电平时间us / (1000/17);而1000/17 ≈ 58.82
所以一般为了方便计算,距离换算就是将求得的高电平时间除以58,即得距离值,单位cm。
硬件连接
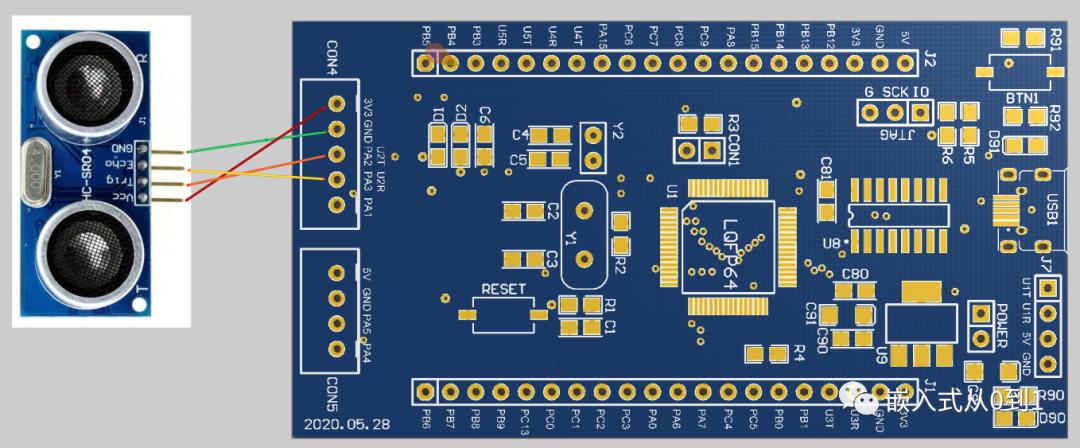
目前HC-SR04这个模块有很多版本,最好选用3.3V和5V兼容的版本。

我也拿了一个5V的老版本做了一下测试,使用3.3V供电,测量的数据不对,什么也不改变的情况下,将电源引脚供电改为5V供电,返回的数据就正常了。
如果使用5V老版本的HC-SR04模块,为了使系统能够稳定,最好选用5V耐受的IO引脚,诸如带有下面FT标识的引脚。

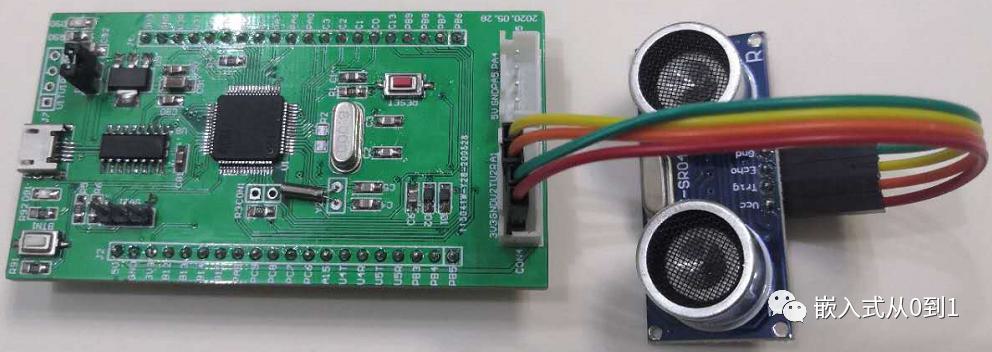
实际效果图
下面硬件使用的STM32核心板为我们“2020.06每月一练”的核心板,需要资料的可以后台回复“每月一练”获取。
测试结果
分别将HC-SR04放置于障碍物前30cm、20cm、10cm处各测量两次,具体数据如下所示:

通过上面我们可以看出,定时器的方式的准确度明显高于延时函数的实现方式,自己分析一下,为什么延时函数的方式误差会差这么多呢?
当然这里面的误差还包括我摆放的原因导致的误差。
资料获取
微信公众号后台回复“SR04”,可以下载超声波测距原理及实现网文对应的工程源码。