
将沙基机器人和智能沙漠引入沙漠腹地,进行沙尘暴观测和预报,可以将其遥感观测的大尺度进一步缩小,实现沙粒、沙丘尺度的探测和细观性研究,揭开沙尘暴形成机制的更多细节,进而实现沙尘暴的监测和预警。
沙尘暴来临时,黄沙漫天、风干气燥、空气污浊,不仅有可能造成交通和供电受阻,还严重危害着人类健康和自然环境。可以说,沙尘暴和荒漠化一样,是一种危害性极大的全球性环境问题。沙尘暴的形成包括3个基本条件:物质条件——沙源;动力条件——大风;局部地热条件——大气状态。那么在这3个条件下,沙尘暴到底是怎么形成的?如何能够对沙尘暴实现有效的监测和预警呢?
2007年,世界气象组织建立了沙尘暴预警评估系统,旨在全球范围内进行沙尘暴过程的持续观测,获取沙尘暴过程的更多信息,进而明确沙尘暴的起因并实现预警。目前的沙尘暴观测主要依赖于由常规气象站组成的地面沙尘暴观测网和卫星沙尘暴遥感监测信息网。前者的观测站多数设立于沙漠边缘(极个别除外),空间分布密度低,所采集的沙漠和沙漠化信息较少,观测方法主要采用定点、人工测量,受信息采集供电制约;而后者适合大尺度宏观研究,主要用于沙尘暴发生之后的沙尘暴宏观参数(如沙尘输送高度、垂直分布、路径、范围、通量等)观测,存在空间分辨率和光谱分辨率较低的问题。最重要的是,这两种观测方式均对沙尘暴形成的重要条件之一——沙源——的观测手段有限,难以对沙尘暴的发生过程实现观测。
与此同时,一组数据引起了我们的注意:1961—2006年间沙尘暴的数据统计结果显示,沙尘暴年发生日数和次数峰值均在沙漠腹地,最高总日数达75天。这给我们带来了一个启示:沙漠腹地是沙尘暴最主要的发源地。如果能够深入沙漠腹地,进行沙粒、沙丘尺度的探测和细观性研究,将能够帮助我们更加直观地认识和掌握沙尘暴的起因和运动规律。于是,一个想法就此诞生:利用沙漠机器人和无线传感器网络深入沙尘暴源地进行沙尘信息监测的研究。这样一来,就可以将沙尘暴观测和预报的空间尺度由遥感观测的大尺度缩小为源区内的小尺度,同时将观测时间推前至小尺度涡旋系统生成的初期,推动沙尘暴研究走向深入。这实际上是引入了“智能沙漠”的概念,即在沙漠环境下借助传感与遥感网络、通信与控制、能源捕获与管理等技术,获取不同尺度下沙漠的气象气候信息、生态信息和战场地理环境信息,实现野外恶劣气候条件下的远程、全天候无人值守,建立大型沙漠信息数据中心,并通过数据挖掘、工程计算等数学物理方法,反演长时间和大面积空间内沙漠化过程或沙尘天气(如沙尘暴、强沙尘等)的形成,从而认识沙丘运动规律,掌握沙尘暴起因动力学机制。
在国家国际科技合作项目“沙漠腹地沙尘监测与信息获取技术合作研究”中,我们上海交通大学光通信国家重点实验室的研究团队,与宁夏大学沙漠信息智能感知自治区重点实验、中科院寒区旱区以及环境工程研究所沙漠重点实验室及美国宾夕法尼亚大学工程学院机器人实验室展开合作,将这个想法付诸实践。

深入沙漠腹地
深入沙漠腹地进行沙尘信息监测研究,意味着我们将面临大昼夜温差、强太阳辐照、强风沙冲击等极端沙漠环境条件以及能源无法持续供应的挑战。深入腹地是第一步,而沙基机器人则是我们的解决办法。
美国在复杂路基机器人研制方面走在世界前列,已将机器人成功应用于水下探测,并在恶劣环境下替代人工劳动。引入复杂路基机器人技术,可以在无人值守的条件下进入沙漠腹地,获取沙尘暴形成的物质条件——沙源区——的细观信息。为了提高机器人的抗风沙侵蚀能力、高温差适应性、抗振性能、续航能力,以及机器人自主定位与导航、多机器人编队、机器人控制算法的鲁棒性和危险环境下的自拯救能力,项目研究团队与宾夕法尼亚大学合作,研制了六足C形腿型机器人。根据仿生学原理及实际试验的分析,该机器人框架采用“日”字形结构,机器人外壳采用了碳纤维材料和环氧树脂板材(碳纤维材料导电,需要绝缘的区域改用环氧树脂板)。机器人的C形腿厚度有所加宽,包裹有沟槽橡胶层,一方面在保证强度的前提下增加了腿部弹性,减缓了运动颠簸对机身带来的冲击,另一方面增大了与沙地的摩擦力,同时也减小了沉陷。通过软件仿真及试验装置测试等步骤优化机器人结构,指导动力系统和供能系统的选型,我们完成了沙基机器人的设计和制作。该款沙基机器人携带的24伏、15安时的电池可满足平地1小时的续航要求,机器人可爬越坡度为20度的斜坡,在平地上可达到100米/小时的速度(测试过程中机器人的最大速度约为0.3375米/秒,即1215米/小时),且可以携带8公斤重的负载完成行走。
无线传感与数据采集
从沙漠腹地获取的信息通过无线传感网络系统传输,该网络采用控制站、主机器人和从机器人三层结构,网络拓扑为菊花链型。主机器人直接与控制站通信,主机器人之间没有直接通信;一个主机器人下有多个从机器人,每个从机器人只从属于一个主机器人,从机器人只与自己从属的主机器人通信。控制站计算机通过RS485串口与塔顶无线电台连接,电台通过450兆赫微波调频技术(串口通信速度为4800比特/秒)与25公里处的远端主机器通信,主机器人与从属机器人通过ZigBee技术(串口通信速度为9600比特/秒)进行无线通信。
沙漠机器人上搭载了多只不同类型的环境监测传感器,从而可以较为全面、准确地监测沙漠的地理环境信息。地理环境信息采集传感器包括风速、风向、大气压强、空气温湿度、风蚀和地磁场强传感器;外部环境信息采集传感器包括沙埋量、加速度和超声测距传感器。根据各传感器接口方式的不同,按照分级的方式与采集控制中心相连接,以实现通信及信息采集。采集控制中心由一个现场可编程门阵列(FPGA)芯片与两个单片机组成。其中单片机1通过集成电路总线(IIC)通信接口与温湿度传感器、三轴数字罗盘、三轴数字加速度计相连,以读取其数据,通过脉冲计数计算并获得沙埋量信息;FPGA通过脉冲计数读取风蚀传感器及其配套风速传感器数据;在单片机2的通道选择信号的控制下,FPGA将建立对应通道号的透明的异步串行通信通道,实现通道切换的功能。单片机2通过FPGA的内建通道与风速、风向、大气压力、超声波传感器及单片机1相连接,读取其数据。单片机通过时序信号的控制读取FPGA内所采集的风蚀信息测定模块的数据,将所采集的传感器信息汇总、打包,并在前级系统的指令控制下通过异步串行接口上传。
沙漠机器人的电源中安装了可折叠光伏发电系统,分为太阳能板驱动、光伏转换充电两个子系统。整个可折叠光伏发电系统的大致工作过程为:太阳能电池板接收到充电信号时,太阳能板驱动系统开始工作,通过伺服电机控制太阳能板展开,当太阳能板转过90度后,太阳能电池板开始接收太阳能,光电转换充电系统工作,将接收到的太阳能转化为电能储存到锂电池里。
感知数据的融合处理与沙尘暴重构
沙漠机器人在沙漠腹地进行传感数据的采集、传感网络的远距离传送,感知数据进入主控制台数据服务器,将沙漠腹地的数据汇聚融合到数据库,并引入到纳维-斯托克斯(Navier-Stokes)方程中,从而进行沙尘暴的理论研究。Navier-Stokes方程是著名的粘性流体方程,该方程的解可能蕴涵着非常丰富的结构及机理,数学家和物理学家深信,无论是微风还是湍流,都可以通过Navier-Stokes方程的解得到描述、理解和预测。
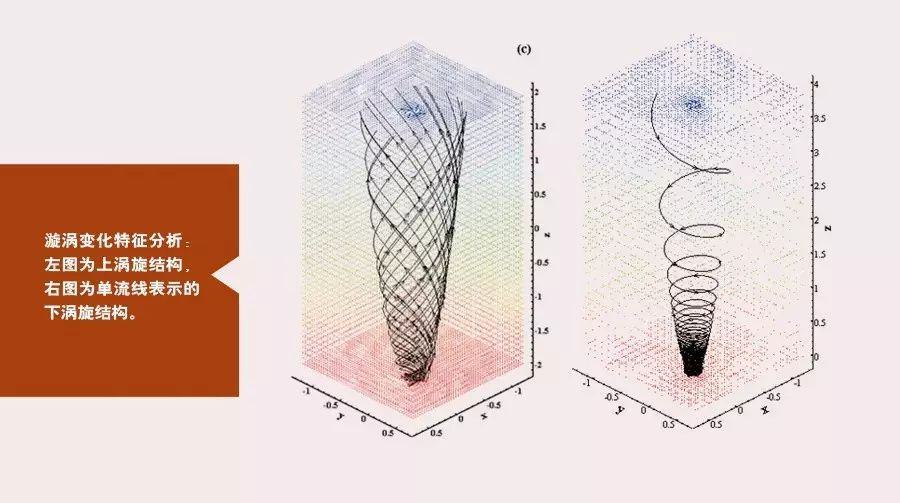
我们用李群方法求解了不可压缩流体方程,结果显示了一个涡旋结构,有关细节对了解沙尘暴结构的发育及其特征有一定的帮助。涡旋呈开口向上、横向逐渐弥散的喇叭状结构。这种结构在横向扩展、发育的同时,旋转角速度随之增加,涡旋增强;旋转角速度随横向半径的增加而呈现类似高斯分布曲线的走势。这些与实际观察完全一致,即涡旋中心几乎没有“龙眼”结构(介质粒子),沿径向涡旋强度逐渐增强,在一定位置处达到峰值后转而衰减。另一个代表涡旋强度的量——垂向旋度——随粘性系数的增加而呈现指数衰减并且“穿零”,亦即意味着涡旋结构的强度随粘性增强(密度或湿度增大)而衰减。一种极端情况是当粘性系数增加到对应结构为液体时,上述喇叭状结构流向反转,与观察到的水中涡旋完全对应。这部分工作的重要启示在于,通过不断细化Navier-Stokes方程各项,可逐步逼近理解沙尘暴发育过程的特征及机制,也可为动力学重构提供更多、更准确的重构规则。
可移动沙尘监测传感网络与野外试验验证
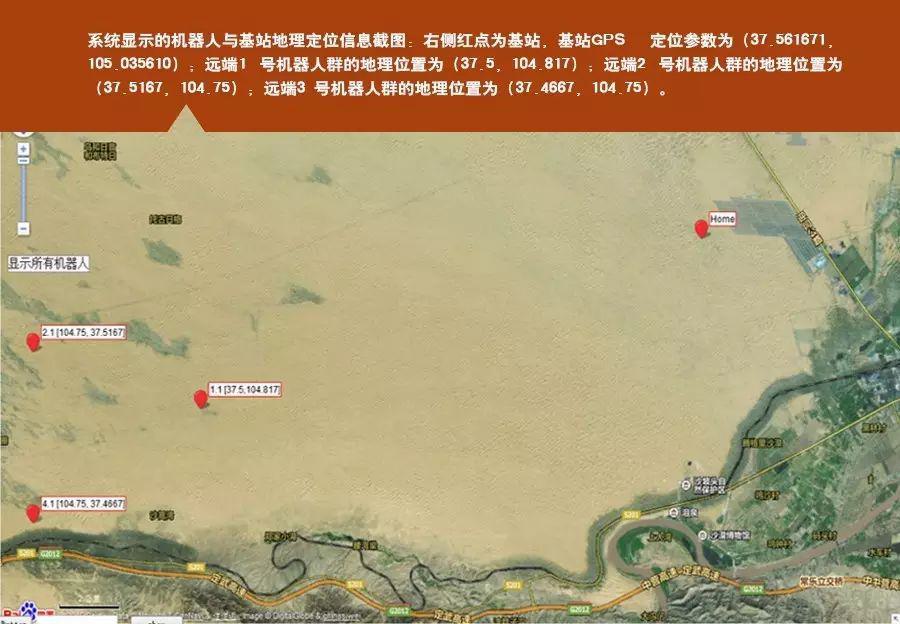
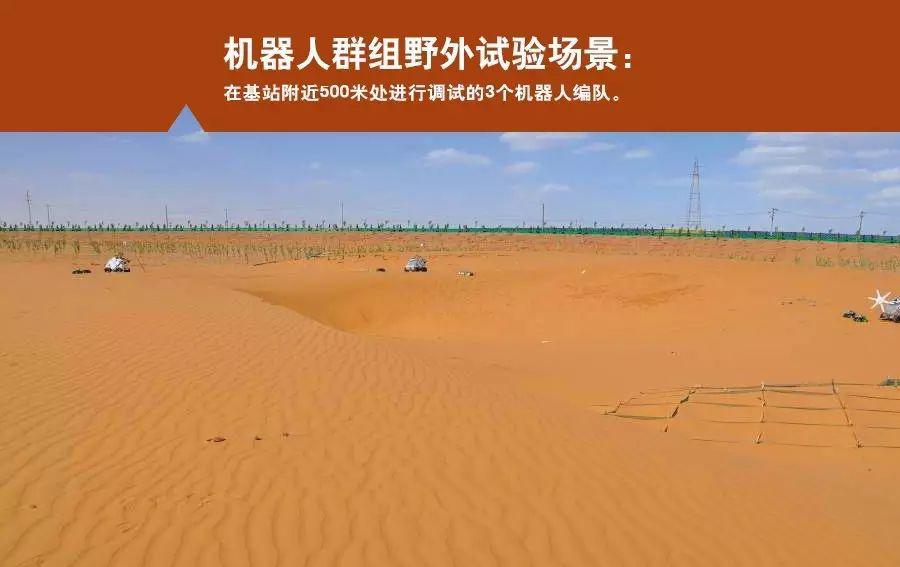
项目通过野外实地勘察,决定将腾格里沙漠作为试验区域,腾格里沙漠位于陕西、内蒙与宁夏三省交界,周边城镇是宁夏中卫迎水桥。在野外试验中,首先将机器人编队为1号机器人群、2号机器人群和3号机器人群,每个机器人群包括1个主机器人和2个子机器人,在基站附近进行通信控制验证。验证通过后,将3个机器人群分别送往基站外沙漠腹地25公里深处,并分别与基站通信,构成的网络覆盖面积约为5平方公里。每个机器人装载一定数量的传感器,搭建一个由数组沙基机器人组成的信息感知网络,通过微波网桥和通信机器人组成数据无线传输网络,子节点与远程数据中心距离25公里以上。
将沙基机器人技术用于沙漠腹地的沙尘暴监测,这在国内外的报道中尚属首次。项目研究团队不仅在消化吸收美国沙基机器人技术基础上设计出一种可以适应沙漠腹地工作环境的沙漠机器人,还搭建了能适应较强风沙环境的无线传感网络,解决了强沙尘条件下无线信号的衰减、大尺度无线覆盖能力、电子设备对环境的适应性及其节能降耗等关键问题。在此过程中,研究团队通过沙粒尺度新型传感器技术、无线传感网络与传输技术、沙基机器人技术、沙漠新能源技术, 建立了深入沙漠腹地的可移动无线传感网络, 进而获取沙粒振动频率、风沙流强度、风速、温湿度等实时数据, 通过信息融合、大数据过滤以及时间序列分析等方法,挖掘形成沙尘暴的3个核心要素(局部地热条件、强风和沙尘物质源)之间的耦合关系,是对沙尘暴起因机制和预测预报的一次有益探索。
通过沙基机器人深入沙漠腹地进行无人可移动检测,利用智能沙漠获取更加精确、灵活的沙粒尺度上的信息参量,可以进一步为揭示沙尘暴的形成机理提供技术支撑,未来有望揭开沙尘暴的更多秘密。
致谢:感谢国家国际科技合作项目“沙漠腹地沙尘监测与信息获取技术合作研究”(项目编号:2011DFA11780)的支持。该项目中做出主要贡献的研究人员包括美国宾夕法尼亚大学丹尼尔.库迪切克(Daniel Koditschek)教授,中国科学院寒区旱区与环境工程研究所董治宝研究员、张正偲副研究员,上海交通大学王贺升教授、彭宏利副教授、钱良副教授,宁夏大学沙漠信息智能感知自治区重点实验室杨泽林教授、王旭明教授等,在此一并表示感谢。
作者:李新碗
李新碗,教授,博士指导教师,IEEE高级会员,上海交通大学电子科学与技术专业博士, 2005年入选教育部新世纪优秀人才计划,2006年入选上海市曙光学者。
 长按二维码关注我们吧!
长按二维码关注我们吧!