
清华大学航天航空学院王浩文团队针对中国大田航化喷洒需求自主研制了专业植保无人直升机XV-2,并完成了面向大田植保作业任务的飞行测试,为精准农业、智慧农业时代的到来做好了准备。
提起无人机,很多人首先想到的是军事应用及航拍;而实际上,无人机的应用早已不局限于此。其中一个重要的用途就是农业航空植保。在广阔的耕地上空,无人机可以携带药液,跨越或泥泞或崎岖的道路,精准地将药液喷洒到作物上,甚至可以检查作物的生长状况。与传统的人工操纵地面设备进行洒药的方式(主要是人工背负式打药和行走式机械喷洒)相比,无人机喷洒药物的航空植保方式可以有效地实现人药分离,避免人与药液接触,因而不会发生中毒事件;同时由于航化喷洒过程中飞行器无须与作物进行物理接触,即使对于密植的作物,也不会带来行走式设备碾压造成的减产问题。
中国作为农业大国,无人机航空植保无疑是农业现代化发展的重要方向。国务院发布的《全国农业现代化规划(2016—2020年)》明确指出,到2020年,国家将力争完成10亿亩集中连片、稳产、高产的高标准农田,因此需要载药量大、航时长、可自主进行航迹喷洒的无人机以满足我国航化喷洒的需求。
早在2010年,清华大学航天航空学院的团队就已经开始了无人直升机项目的研发。团队致力于打造具有完全自主知识产权的无人直升机,并针对国内大田航化喷洒需求,研发出XV-2专业植保无人机。该无人机的最大起飞重量达230公斤,最大载药量70公斤,与目前国内其他农业植保无人机相比,载药量有了明显提升。这款无人机作为全球最大的专业植保无人直升机,可实现超视距定高、定速模式下的精准航迹自主飞行,保证了大田作业过程中的精准喷洒。
团队在XV-2无人直升机的研发过程中突破了多项关键技术,并根据农业植保的特点和需求进行了有针对性的优化。其研发设计过程中所使用的直升机空气动力学、旋翼动力学、飞行动力学与控制仿真和设计软件均源自团队多年来的研究成果,其有效性及先进性已得到多个型号的验证。同时整机飞控系统也由团队自行研发,具有自主知识产权。另外,XV-2所使用的发动机由隆鑫通用动力股份有限公司生产和提供。如果说发动机是无人机的心脏,那么升力系统和飞控系统就是无人直升机的翅膀和大脑。可以说,XV-2无人直升机的诞生真正实现了“中国制造”向“中国创造”的转变。
动力系统、升力系统设计是一项极具挑战性的工作。在XV-2无人直升机的技术创新中,团队对这两个系统进行了高度集成化。团队利用国产先进摩托车发动机功重比高、集成度高、核心部件批量大、配套容易、成熟度高等特点,提出了发动机、主减速器、起动机、发电机、离合器一体化的设计思想,根据无人直升机的动力输出要求,将无人直升机的发动机、传动系统、旋翼系统、操纵系统、燃油系统、滑油系统合并为模块化的动力单元,以提高动力单元的功重比(专利编号:201210209175.4)。另外,团队还对散热系统进行优化设计,既能够满足动力单元热机部分和传动部分的散热需求,又可以对集成在动力单元内部的大功率发电机进行冷却,从而使动力单元适用于植保无人直升机重复起降、长时间悬停、低速前飞的特殊航化喷洒使用模式。
团队使用自主研发的旋翼综合气动弹性动力学软件,对XV-2的桨叶进行气动及复合材料结构优化设计,首次将桨尖下反技术应用在国产直升机上,使其悬停效率接近0.8,达到了国际第四代直升机旋翼桨叶的技术水平。通过旋翼形成的下洗流,配合低高度飞行,可以让药液充分附着在农作物表面,从而实现最优的喷洒效果。

团队所研发的XV-2无人直升机的另一个特点在于,它是一款混合动力无人直升机:其主旋翼由发动机动力单元直驱,尾桨由大功率电动机直驱。为了实现无人机这一混合动力设计,团队提出了电动机直驱尾桨概念,去除了传统直升机尾桨所需的传动机构,在一体化动力系统内部通过集成大功率高效发电机,为尾桨电机和机载设备提供能量。另外,去除传统直升机尾桨所需的减速器和传动装置等复杂结构,也提高了整机可靠性。
为了使XV-2无人机更好地进行农业植保作业,团队自主研发了一体化飞控系统,该系统集成了飞行控制、导航、发动机外环控制等功能。一体化飞控系统的软硬件完全由团队自主研发,通过算法与软硬件的一体化设计,保证了算法执行效率的最优。一体化飞控系统使用微机电系统(MEMS)惯性测量单元,通过滤波算法与温控转台标定提高导航精度;通过使用实时动态差分法(RTK)定位模块,实现对当前位置的准确测量;采用毫米波雷达高度计和气压传感器融合的方法对直升机的地形跟随高度进行精确测量。另外,团队还针对XV-2飞行动力学特性研发了自抗扰、自适应飞控算法,可以实现定高定速模式下的精准航迹自主飞行。地面站软件的自主航迹规划功能结合精准航迹飞行控制,可以有效降低植保工作人员的负担,提高作业效率,实现精准喷洒。一体化飞控系统中集成的整机状态监测单元可对直升机的振动等关键信息进行实时监测,内部集成的自主返航功能可在紧急状况下或农药洒尽后实现直升机的安全返航,从而保证无人机的飞行安全。
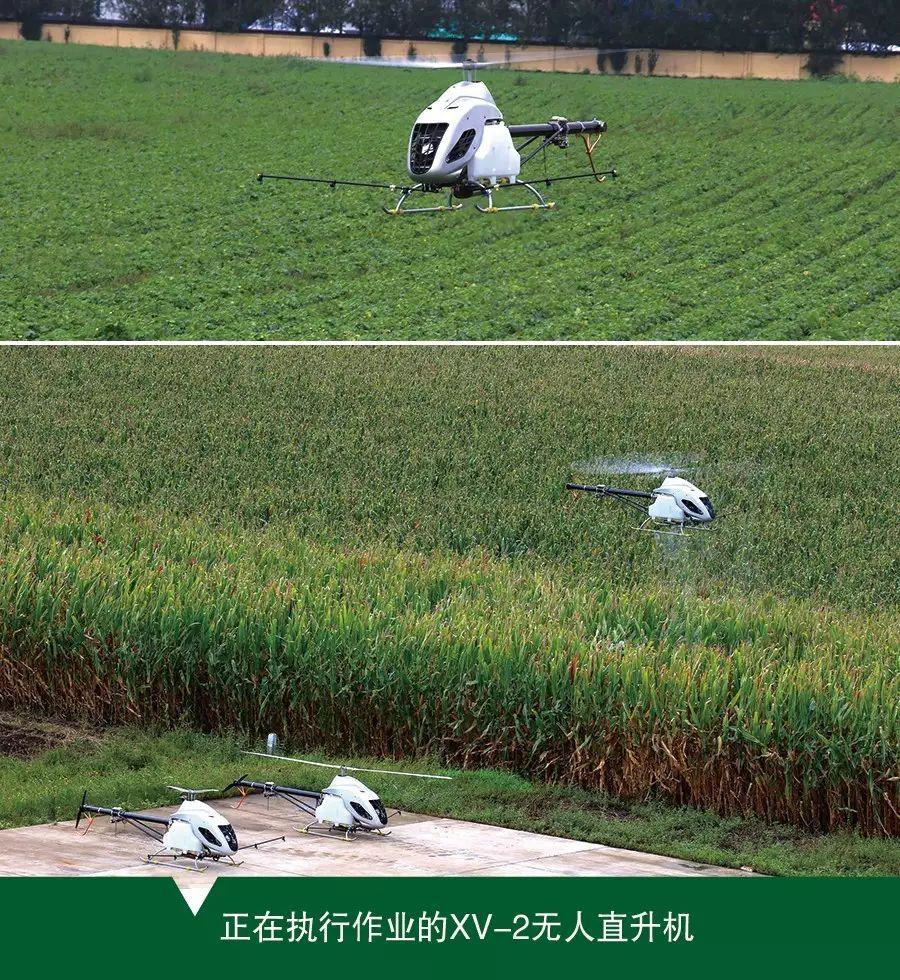
团队针对中国农业大田植保需求而研发的XV-2专业植保无人机,已于2016年9月在哈尔滨市双城区完成了符合大田作业模式要求的超视距(高于550米)、低高度(低于10米)、额定作业速度(15米/秒)的自主航迹飞行科目测试验证工作,并于2016年11月1日正式亮相第11届珠海航展。
目前XV-2无人直升机的可靠性测试工作正在紧锣密鼓地进行之中,包括关键零部件振动试验、沙尘试验、温度湿度振动三综合试验、霉菌试验、盐雾试验等。同步开展的耐久性飞行试验,在不断提高整机可靠性的同时,为地面人员操控方式的优化积累经验。

未来,团队将与农业信息化服务紧密结合,顺应国内精准农业、智慧农业的大趋势;同时针对不同领域的使用需求,细分无人直升机市场,打造全系列的无人直升机平台,使无人直升机的每一次飞行更安全、更智能、更高效。
作者:王浩文、姜辰
(王浩文,清华大学航天航空学院航空宇航工程系教授、博导、首席研究员。一直从事飞行器设计和直升机动力学方面的研究和教学工作,研究方向包括直升机非定常载荷计算、直升机旋翼/机身耦合系统综合气弹分析、直升机振动与控制技术、以及无人直升机设计,建立了一套直升机旋翼/机身耦合系统综合气弹分析新方法,在国内多个直升机型号研制中得到成功应用,并在国内率先开展新概念电控旋翼系统研究。曾担任某型号无人直升机常务副总师,并作为副总师参与某武器装备创新项目及“863”课题各1项,自主研发200kg级无人直升机TH150。)

