
肌电控制假手是一类典型的人机交互设备,对于辅助手臂截肢患者恢复手部功能有着重要的作用。东南大学机器人传感与控制技术研究所致力于提高肌电假手对不同残疾人的适应能力,增强假手的可控性和可感知能力,研制了具有自主学习能力和力触觉感知反馈能力的肌电假手。
意外伤害和疾病导致的肢体缺失或功能障碍会严重影响患者的正常生活。肢体残疾已经成为我国人口的重大残疾病之一。肢体的残疾给患者的生活带来了很多不便,也为整个社会带来了很大的负担。我国为保障残疾人的生活质量,出台了众多政策,《关于进一步加强残疾人康复工作的意见》和国务院印发的《“十三五”加快残疾人小康进程规划纲要》都对增进残疾人民生福祉、促进残疾人全面发展、帮助残疾人享受生活做出了重要部署。“让伤残人士都能过上有尊严的生活”不仅是一句口号,也是所有医护人员都应该身体力行的救治理念。
具有力触觉感知功能的肌电假手是一种极具应用前景的上肢功能重建装置,与其相关的研究在近几十年来取得了很大进展,其中商业化的假肢结构简单、功能单一,基本上只能起到机械支撑和美观的作用,虽然能在一定程度上代替患者已丢失的肢体,但是依然不能使患者满意。相关调查显示,30.5%的上臂缺失患者不能很好地使用假手。探索帮助残疾者恢复肢体功能的新方法、新技术,改善和提高患者的运动功能,减轻和消除身体功能的缺陷成了当今假肢研究的重点。因此,研发更加智能的假肢控制系统,改善假肢的操控体验,使肢体残疾人最大限度地恢复生活和工作能力,不仅能提高广大截肢者的生活品质,增加其就业机会,还能减轻家庭与社会的负担,增进社会和谐。
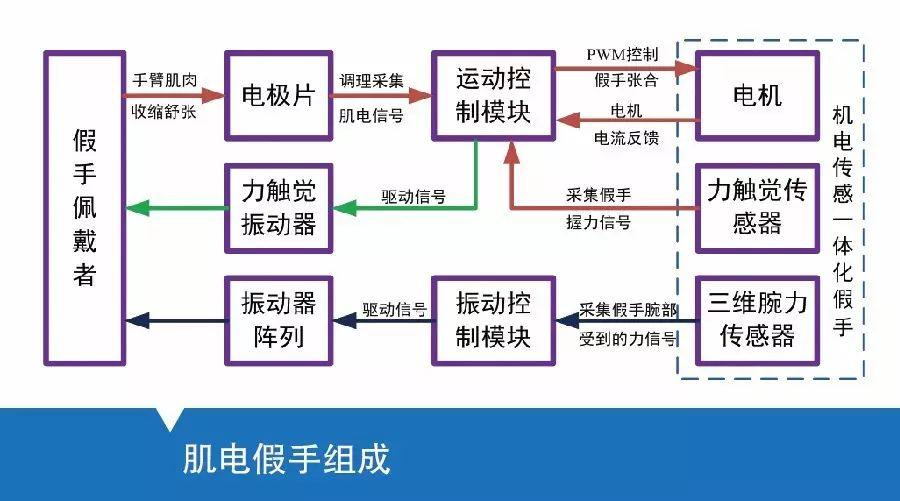
东南大学机器人传感与控制技术研究所致力于提高肌电假手对不同残疾人的适应能力,增强假手的可控性和可感知能力,研制出具有自主学习能力和力触觉感知反馈能力的肌电假手。该肌电假手通过采集人体手臂部位的肌电信号,结合安装在假手手指部位的力触觉传感器,使用模糊比例控制算法实现对假手开合速度和握力的比例控制,同时将假手的握力情况通过振动器反馈给假手佩戴者,使得假手佩戴者能感知到假手的握力情况,及时调整控制策略,增强了假手对于佩戴者的本体感。设计的假手具有自主学习功能,能主动适应不同佩戴者的肌电信号强度,缩短了使用假手的学习时间。
 商业化的肌电假手多为单自由度假手,采用一对肌电传感器,将其贴合在佩戴者手臂的一对拮抗肌上进行肌电信号的测量,测量得到的肌电信号经过整流、滤波后用于识别佩戴者的动作意图。由于经过放大、整流和滤波处理后的肌电信号与测量部位的肌肉收缩程度相关,因此将一对拮抗肌上的肌电信号做差分运算即可得到假手的开合控制命令。这种控制模式使用简单、操作方便,然而在实际应用中,由于未充分考虑佩戴者肌电信号的个体差异性,而给患者使用带来了不便,因此仍然存在缺陷。因为在肌电假手中,肌电信号是假手控制指令的来源,而由于肌电信号存在很强的个体差异,不同佩戴者在同一部位测量得到的肌电信号强度差异较大;测量部位不确定,同样会带来肌电信号的差异,同一佩戴者,在其手臂不同部位测量得到的肌电信号也是存在差异的,而传感器在手臂上的贴合位置在使用过程中会发生变化,这会导致使用过程中肌电信号发生变化;此外,环境温、湿度的变化会引起传感器和皮肤之间阻抗的变化,从而导致测量得到的肌电信号发生变化。这些因素导致残疾人在安装佩戴假手时,需要先对其残臂上的肌电信号进行测量,然后根据其肌电信号的强度对假手的控制参数进行调整,并且往往需要经过一段较长时间的训练、适应,佩戴者才能够较为灵活地控制假手。此外,对于同一个佩戴者,在使用假手的过程中,其假手的控制参数也可能需要重新进行调整,造成了极大的不便。甚至,有部分患者为了追求假手的可靠控制而放弃了使用肌电假手,选择了功能单一却更为可靠的开关控制假手。
商业化的肌电假手多为单自由度假手,采用一对肌电传感器,将其贴合在佩戴者手臂的一对拮抗肌上进行肌电信号的测量,测量得到的肌电信号经过整流、滤波后用于识别佩戴者的动作意图。由于经过放大、整流和滤波处理后的肌电信号与测量部位的肌肉收缩程度相关,因此将一对拮抗肌上的肌电信号做差分运算即可得到假手的开合控制命令。这种控制模式使用简单、操作方便,然而在实际应用中,由于未充分考虑佩戴者肌电信号的个体差异性,而给患者使用带来了不便,因此仍然存在缺陷。因为在肌电假手中,肌电信号是假手控制指令的来源,而由于肌电信号存在很强的个体差异,不同佩戴者在同一部位测量得到的肌电信号强度差异较大;测量部位不确定,同样会带来肌电信号的差异,同一佩戴者,在其手臂不同部位测量得到的肌电信号也是存在差异的,而传感器在手臂上的贴合位置在使用过程中会发生变化,这会导致使用过程中肌电信号发生变化;此外,环境温、湿度的变化会引起传感器和皮肤之间阻抗的变化,从而导致测量得到的肌电信号发生变化。这些因素导致残疾人在安装佩戴假手时,需要先对其残臂上的肌电信号进行测量,然后根据其肌电信号的强度对假手的控制参数进行调整,并且往往需要经过一段较长时间的训练、适应,佩戴者才能够较为灵活地控制假手。此外,对于同一个佩戴者,在使用假手的过程中,其假手的控制参数也可能需要重新进行调整,造成了极大的不便。甚至,有部分患者为了追求假手的可靠控制而放弃了使用肌电假手,选择了功能单一却更为可靠的开关控制假手。
东南大学机器人传感与控制技术研究所针对商业化假手在实际使用中存在的上述问题,研制了具有肌电信号自适应学习能力的肌电假手,该假手能够主动根据佩戴者的肌电信号动态调整假手的控制参数,使得残疾人在安装佩戴假手的时候无须进行参数调整,就可以在短时间内灵活自如地控制假手。
对于手部缺失的残疾人而言,虽然假手在一定程度上重建了手部的运动功能,但是由于缺失了手部的触觉感受器,残疾人在使用假手抓取物体的过程中并不能很好地感知假手的抓取状态。在实际使用中,残疾人往往需要将注意力特别是视线集中在假手上,通过视觉来判断假手是否按照自身的意愿抓取了物体,在光线较暗或有视觉死角的情况下,残疾人往往不能及时地判断假手是否已经按自己的意愿抓取了物体。这样一方面增加了残疾人的精神负担,另一方面也限制了假手的使用。
人体拥有庞大而复杂的神经系统,分布在人体体表的游离神经末梢能感受温度、痛觉、触觉等多种感觉,这些感觉与人类的日常活动息息相关,能帮助我们更好地和环境相处。在众多感觉中,触觉是人体一种重要的但未被充分利用的信息获取方式,它是接触、滑动、压觉等机械刺激的总称。研究触觉再现感知技术,用于帮助残疾人快速准确地感知假手的状态,将帮助残疾人以较短的时间适应和使用假手,并使得假手的控制更加地直观,从而改善假手的控制效果和提高假手对于残疾人的可接受度。
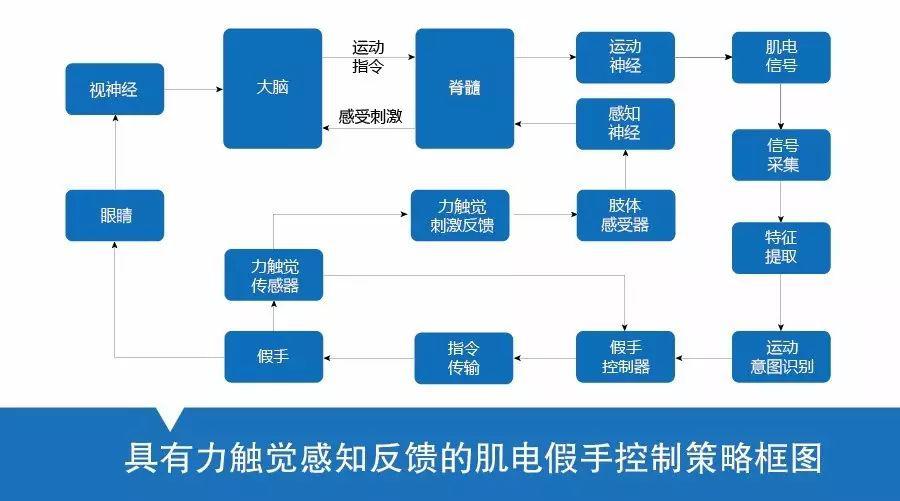
 东南大学机器人传感与控制技术研究所以增强假手对于佩戴者的本体感,增加佩戴者和假手间的信息交互为目标,研制出具有力触觉感知反馈能力的假手。该假手以其佩戴者为主导,佩戴者根据需要发出控制指令控制假手的抓握/开合,安装在假手上的力触觉传感器将检测到的握力、三维推拉力等信息一方面反馈给假手的控制器,用于实现握力跟踪控制,另一方面通过力触觉刺激反馈给佩戴者。在视觉反馈的帮助下,佩戴者可以及时地获取假手的抓握信息,并根据需要调整控制指令,从而提高假手的抓取控制效果。
东南大学机器人传感与控制技术研究所以增强假手对于佩戴者的本体感,增加佩戴者和假手间的信息交互为目标,研制出具有力触觉感知反馈能力的假手。该假手以其佩戴者为主导,佩戴者根据需要发出控制指令控制假手的抓握/开合,安装在假手上的力触觉传感器将检测到的握力、三维推拉力等信息一方面反馈给假手的控制器,用于实现握力跟踪控制,另一方面通过力触觉刺激反馈给佩戴者。在视觉反馈的帮助下,佩戴者可以及时地获取假手的抓握信息,并根据需要调整控制指令,从而提高假手的抓取控制效果。
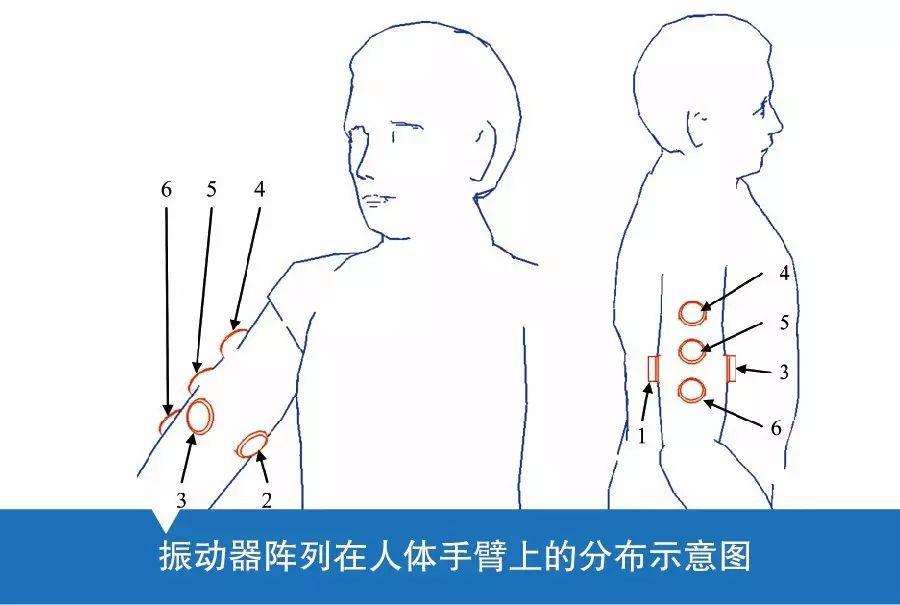
为了方便使用,将振动触觉刺激装置设计成袖带形式,主要包括微型振动器阵列、振动驱动模块、振动控制微控制单元(MCU)蓝牙模块以及锂电池等。使用时,假手的控制器将力触觉传感器检测到的假手力触觉信息(握力、三维推拉力、物体的滑动状态)通过蓝牙模块发送给振动袖带,振动袖带根据接收到的力触觉信息控制振动器有序振动,从而实现将假手的力触觉信息反馈给佩戴者。


 东南大学机器人传感与控制技术研究所从假手用户的实际需求出发,致力于提升商业化假手的控制性能,目前已经研发了三代肌电假手,其中第一代、第二代自2009年开始已经在江苏省丹阳假肢厂有限公司进行生产销售,取得了显著的社会效益和经济效益。第三代肌电假手于2016年日内瓦国际发明展览会上展出,得到专家评委的普遍认可,获得了此次日内瓦国际发明展“银奖”。
东南大学机器人传感与控制技术研究所从假手用户的实际需求出发,致力于提升商业化假手的控制性能,目前已经研发了三代肌电假手,其中第一代、第二代自2009年开始已经在江苏省丹阳假肢厂有限公司进行生产销售,取得了显著的社会效益和经济效益。第三代肌电假手于2016年日内瓦国际发明展览会上展出,得到专家评委的普遍认可,获得了此次日内瓦国际发明展“银奖”。
作者:宋爱国、吴常铖
(宋爱国,东南大学仪器科学与工程学院教授,博士生导师。国家杰出青年科学基金获得者,中国青年科技奖获得者,新世纪百千万人才工程国家级人选,全国优秀科技工作者,江苏省特聘教授。作为项目负责人先后主持完成国家973项目二级课题1项、国家863高技术项目9项、国家自然科学基金项目6项、国家十一五科技支撑项目1项、载人航天921预研项目2项、国防预研项目2项、江苏省自然科学基金项目2项、霍英东青年教师基金项目1项、江苏省高技术产业化项目1项、国际合作项目1项等重要课题42项。)
