
━━━━━
如今,我们通过触摸的方式——轻按、滑动和捏缩拉放——来控制我们的电子世界。2007年苹果首次在iPhone上应用这一技术时,触摸界面还是个新鲜事物,但还不到10年,它就无处不在了。触摸界面现在太常见了,乃至刚会走路的小孩儿都会觉得,如果触摸屏对他们的触碰没反应了,就说明它坏掉了。但触控并非屏幕的最终结局。你在淋浴的时候无法使用触摸屏,你不能在眼镜上架一个触摸屏,而且如果要在手持玻璃板上按压和捏拉,你大概也不愿意去体验虚拟现实(VR)。
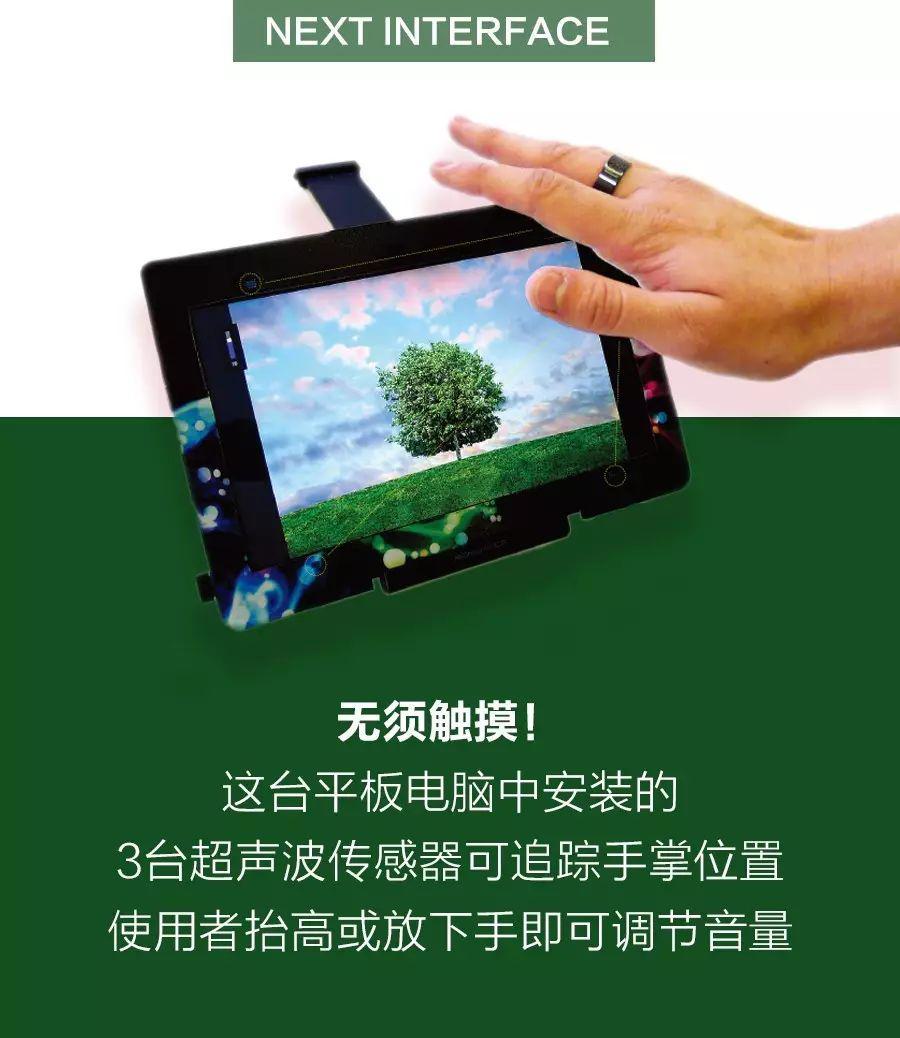
快进到2020年,我预计届时还会有一些手机和平板电脑使用触摸界面,但不会太多。早上晨跑前,你用指尖扫过放在身旁的健身手环,手环内嵌的超声波收发芯片将检测你指尖的动作,识别你的手势,打开你最喜欢的音乐。跑步结束后,如果你淋浴的时候手机响起,你只要将手臂伸出浴室,把手掌置于手机显示屏上方就可以接听电话。接着,在你开车的时候,导航警告和短消息可能会使你分心,但你只要挥挥手就可以让它们不再干扰你了。
鉴于超声波微机电系统(MEMS)近来取得的突破,手势魔法的世界即将来临。
━━━━━
对于基于手势的界面,其逻辑很简单:人类在进化过程中使用双手与环境互动,因此所有人都能很自然地使用手势。虽然近年来语音识别已经得到了极大改善,但有时并不适合发送语音指令,并且需要使用关键短语(例如“好的,谷歌”),这对简单控制来说也并不合适。举例来说,在一些汽车里,你可以使用语音控制音响,但首先你必须按下按钮来启动语音控制,之后还要按顺序分别发出3个语音命令:“收音机”“音量”和“增大”。与直接触摸音量按钮相比,这反而更麻烦;而手势控制则可以一样简单,甚至是更加轻松:你不需要找到按钮,只需在收音机前挥一下手就可以了。
触控界面和语音识别的局限性在虚拟现实和增强现实中体现得更明显。毕竟,若是在操纵虚拟物体时使用触摸屏或者语音命令“好的,谷歌,挥剑”,那实在是没有身临其境的感觉。
要实现基于手势的用户界面,一个显而易见的方式似乎是使用摄像头,因为几乎每台笔记本电脑、平板电脑和智能手机都配有摄像头。但是大多数人都对其个人电子设备上“永远开启”的摄像头感到别扭(最近在互联网流传甚广的一张照片里,脸谱网创始人马克•扎克伯格用胶带把他笔记本电脑的摄像头封上了);而且手势追踪所需要的视频采集功能也非常耗电:谷歌眼镜的用户报告说,仅仅拍摄了30分钟视频,电池就没电了。
摄像头自身也存在一个更加根本性的问题:它只能捕捉二维图像,难以从复杂的光学背景中识别出用户的手。如果你曾经在平行泊车和使用后视镜时错误判断与后车的距离,你就知道仅凭视觉来判断距离有多么困难。
图像处理的计算成本也必须考虑在内。即便是在微软功能强大的Xbox游戏机中,许多开发者也都选择禁用支持使用红外摄像头来追踪动作的Kinect体感器,以便获得专门分配给Kinect图像处理功能的那10%的图形处理单元。

━━━━━
最近几年,人们为实现无需摄像头的手势感应技术付出了一番努力。3种主要竞争设备是雷达、光学红外和超声波。
在Soli项目中,谷歌已经开发出了一个用于手势感应的60千兆赫微型雷达系统。据悉,该项目开发了一款可植入智能手表的最新原型机,其功耗为54毫瓦,这一功耗听上去虽然微不足道,但事实上对于手表来说已经很可观了。要想把这款雷达作为主要界面来使用,谷歌在未来必须将其功耗降低一个数量级。并且,谷歌拟定这一界面使用的频段为60千兆赫,而随着IEEE 802.1lad(即无线千兆比特,WiGig)形式的通信网络的发展,这一频段已开始变得拥挤。
光学传感器是实现基于手势的界面的另一种方法。
基于低成本红外发光二极管的红外传感器如今已被作为智能手机的近距离传感器使用——这也是智能手机能够在你将手机贴近耳边打电话时禁用触控屏功能的原因。这些近距离传感器可测量附近物体反射的红外光的强度。由于反射强度取决于物体的大小和颜色,因此该功能对于距离的测量并不准确,但判断手机是否贴近你的头部已是绰绰有余。
一些较新的基于红外线的传感器使用的是飞行时间测量法,而不是测量光强。这种方式更精确,但探测光线的飞行时间需要宽带接收机,这就会增加电量消耗。举例来说,意法半导体集团最新研发的红外飞行时间传感器在测量速率为每秒钟10个样本时,功耗为20毫瓦。
而且,所有红外传感器都必须克服其他红外线源(例如卤素灯和日光)的影响。某供应商的飞行时间传感器在室内的探测范围可达2米,但在阴天的室外,其范围却缩小到仅50厘米。其在阳光充足的室外表现如何并未说明,大概是因为这种传感器在这种条件下完全无法工作。

━━━━━
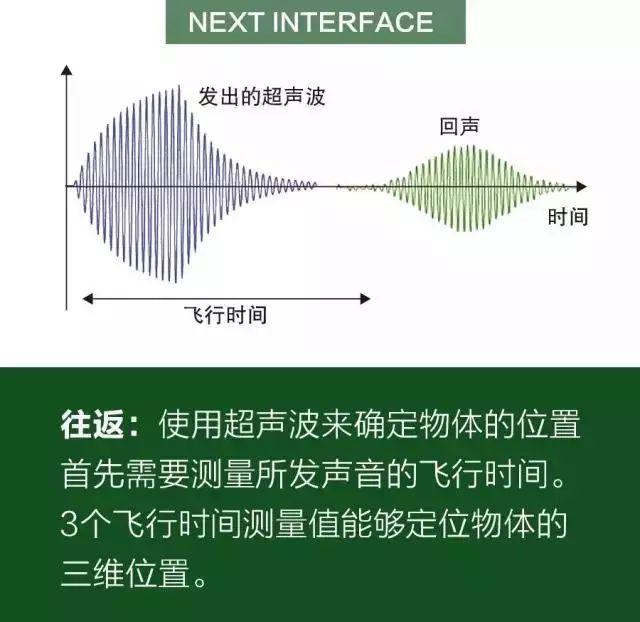
现在来看看超声波的情况。小时候,我们就知道蝙蝠和海豚能够用超声波回声进行定位。令人好奇的是,大多数蝙蝠和海豚并非完全是瞎子。相反,它们是用超声波来辅助视觉,使它们能够确定猎物的大小、距离、位置和速度。它们通过发出高频声音脉冲和听取回声来进行飞行时间测量。在空气中,对于两米之外的目标,回声返回需要大约12毫秒,若要利用超声波追踪快速移动的目标,这个时间太短了;但若要利用超声波在不需要大量带宽处理的情况下区别出多个回声,这个时间就够长了。
超声波测距在人类世界的使用不过100多年,现在仍依赖压电换能器,并且这种换能器与保罗•朗之万于1917年首次展示的石英换能器相差无几,当时的石英换能器是一战期间法国反潜艇研究的一部分。从那时起,超声波就被广泛用于海运(包括从小型游船到核潜艇的所有船种)、医疗、无损检测等领域,并且在或酷炫(想想特斯拉的Autopilot系统)或寻常(例如停车距离传感器)的汽车功能中也有应用。
然而,到目前为止,超声波尚未在消费电子产品中得到大量应用。其中一个原因在于,尽管固态集成电路技术对于射频和红外传感器(德州仪器的工程师杰克•基尔比发明集成电路后不久,该公司就于1962年首次实现了红外发光二极管的商品化)的发展产生了很大影响,但是超声波换能器的材料和设计在这些年中并没有产生很大的变化。不过,MEMS声学换能器最近的创新使得在消费电子产品中使用超声波成为可能。
MEMS技术对微型麦克风领域产生了巨大的影响。声学MEMS组件在2003年首先进入麦克风市场,当时非常受欢迎的摩托罗拉刀锋手机就内置了一款楼氏电子公司生产的MEMS麦克风。今天,几乎所有的智能手机都采用了比传统驻极体电容麦克风更小巧、更省电,并可在仪器上进行更多信号处理的MEMS麦克风。近年来,这类麦克风的主要生产商包括阿库斯蒂克、凌云逻辑、英飞凌、应美盛、楼氏电子、意法半导体等公司。
最近,一些公司开始探索将MEMS麦克风用于接收近声频带超声波。虽然制造商们的产品指标列出了麦克风在声频带(高达约20千赫)中的性能,但这些麦克风上安装的MEMS转能器往往能够收到超过这个频率一倍的信号。
首个进入大众消费市场的基于MEMS的超声波应用是惠普Slate系列平板电脑配套的高通骁龙数字笔。高通是在2012年收购以色列超声波技术公司EPOS Development的时候获得这项技术的。这款超声波书写笔可在距离平板电脑表面一定距离的范围内被追踪到,因此用户可以在平板电脑附近的记事本上用这只笔进行书写。
另一项消费者设备采用超声波创新的例子是挪威Elliptic研究实验室在2016年推出的一款名为“美丽”(Beauty)的产品。这款产品使用智能手机现有的耳机和MEMS麦克风来替代红外近距离传感器,通过超声波方式探测手机是否贴近用户耳朵,从而禁用触摸屏和显示屏功能。
这些早期的超声波产品所采用的是在接收超声波信号方面有着不错表现的传统MEMS麦克风。然而,这些麦克风采用的都是电容换能器,不适合在空气中传输超声波。
电容麦克风换能器由两个以空气间隙(大约1微米)分隔的电容板——背面电极和薄膜——组成。检测薄膜在入射声波的影响下会发生变形,这时,这类换能器通过检测电容的变化来接收声音信号。通常,这也是麦克风的全部功能——接收声音。但也可以逆转麦克风的这一过程,使薄膜变形发出声波,从而传播声音。
这样做的话存在一个问题:好的接收器的薄膜和背板之间的空气间隙非常小,因为接收器的声学灵敏度与空气间隙距离的平方成反比。因此,假如间隙扩大为原来的3倍,则灵敏度将下降到原来的1/9。虽然小的空气间隙有益于接收声音,但对于传播声音来说是个问题,因为小空气间隙会限制薄膜的位移,从而限制可被传输的最大声压等级(SPL)。最大声压等级与周围介质(也就是空气)的声阻抗以及薄膜运动的频率和振幅的乘积成正比。电容转能器,例如电容式超声换能器(CMUT),在以液体为周围介质,超声波频率大于几兆赫,且采用高电压驱动换能器的医学应用中表现良好。
然而,高频超声波在空气中会快速减弱,吸收损耗从40千赫下的1分贝/米提高到800千赫下的100分贝/米。由于这个原因,气介超声换能器通常是在40~200千赫的频率工作。在这一频率范围内,由于空气比液体的声阻抗要小得多,因此超声换能器的振动必须超过1微米,其传播的声压级才能到达一定的水平,测量距离换能器几厘米外物体的回声。振动振幅能够达到这一要求的电容式超声换能器需要更大的空气间隙,需要的工作电压也很高(超过100伏)。
所以,要在一台低电压设备(同时还是灵敏的接收器)中产生高压声波,薄膜位移就不能受邻近背面电极的限制。
解决方法是压电。压电现象于1880年由居里兄弟发现,指的是某些物质能够在机械变形的情况下产生电荷的现象。在压电式微型机械超声换能器(PMUT)中,机械变形使换能器能够将一个入射超声压力波转换成一个电信号。压电式微型机械超声换能器使用逆压电效应来传输超声波,即将电场作用于压电材料上,造成压电式微型机械超声换能器薄膜的机械变形,释放出超声波。由于压电式微型机械超声换能器没有背面电极,因此不会出现限制薄膜运动的硬停机。
压电MEMS设备(例如压电式微型机械超声换能器)依赖于薄膜压电材料,这种材料通常是采用从化学溶液或者蒸汽中沉淀的方法来制造。20年前,采用这两种方法沉淀而成的薄膜压电材料的性能比不上具备同样属性的大部分陶瓷材料;薄膜属性(例如应力和压电系数)未能得到很好的控制,并且沉积过程也无法重复。但是,在一些关键应用(例如喷墨打印头和射频滤波器)的驱使下,研究人员和设备制造商们已经找到了两种材料,即锆钛酸铅(PZT)和氮化铝(AIN),来解决上述问题。今天,制造商在传统超声波换能器中通常使用锆钛酸铅。
━━━━━
采用加州大学伯克利分校传感器与执行器中心授权的压电式微型机械超声换能器技术,我与他人合作创办的Chirp Microsystems公司正在开发基于超声波的用户界面收发机。
从外观上来看,Chirp的超声波收发机与MEMS麦克风完全相同。但机器内部包含一张压电式微型机械超声换能器芯片,并配有定制的超低功率混合信号集成电路,用来管理所有的超声信号处理,使飞行时间传感器在没有外部处理器进行监督的情况下也能够运转。这样一来,传感器的功耗非常低:一次飞行时间测量消耗的热量约为4微焦,在低采样率条件下消耗的电流为几微安。这与流行的健身监测装置上始终开启的用于计算步数的MEMS加速度计的耗电量相当。
可通过测量至少3台传感器的飞行时间并采用“三边测量法”这种算法来确定物体(比如一只手或者一个指尖)的三维位置,这与GPS接收器利用卫星星座来确定位置类似。在Chirp系统中,一台低功率微型控制器被作为传感器中枢来协调三边测量。由于所有的超声波信号处理都是在各传感器内部进行的,因此中枢只需要进行少量计算,读取不同传感器的飞行时间,通过三边测量法计算出最近目标的三维坐标即可。
Chirp在2016年消费电子展(CES)上对超声波手势感应技术进行了首次公开演示。公司现在正在与多家制造商合作,计划将超声波手势传感应用于可穿戴设备、虚拟现实以及游戏机控制器的超声波追踪上。我们预计一些产品将在2017年底上市发售。Chirp目前是唯一一家将空气耦合超声波用压电式微型机械超声换能器实现商业化的公司。不过,还有一些公司正在研究用于其他目的的压电式微型机械超声换能器。例如,创业公司eXo System正致力于研发使用大型压电式微型机械超声换能器阵列的便携式医用超声波系统;惯性传感器制造商应美盛在2015年底宣布,将于2017年推出商标名为“UltraPrint”的基于压电式微型机械超声换能器的超声波指纹传感器。
基于MEMS的低功率压电超声波将改变消费者设备的世界。使用超低功率超声波的简单设备(如手表或手机等),可通过始终开启的传感来进行情境感知,不断探查周围的环境;当被放进手包或口袋,或被袖子覆盖时,设备就进入低功耗模式,只有需要时才会被唤醒。房间和车辆能够感知我们的存在,对用户的娱乐、照明和信息偏好做出反应,所有这些都无须使用具有侵入性的摄像头。平板电脑、娱乐系统,甚至照明开关全都可以被植入基于手势的自然界面中,通过简单动作来进行直观控制。到2020年,即便物联网只能使数百亿智能设备中的一小部分互联,我们也需要一个比语音和触摸更好的方式来与这个互联的世界交流。
讽刺的是,当这种直观手势用户界面进入到日常生活中时,我们将很快忘记它的存在。我们会下意识地用手一扫来使电话静音,用手指划过手腕来发送信息,或者通过挥手来切换应用。而在房间里的某个地方,比如桌子上,或者在你身体上的某处,一台小巧的超声波转能器正在辛勤工作,与惰性空气分子周旋,从我们身边未被使用的超声波频率中挖掘出有用信息。
>>>本文为原创,转载请回复。<<<
往期推荐
