
假设你管理着一个非常庞大的复杂系统。也许是一架飞机、一幢建筑物或是一个通信网络。该系统价值超过5亿美元。你能想象到你将会被告知永远不会有机会对它进行维护吗?也就是说,它一旦运行,将永远不能被检查、修复或升级硬件?●欢迎来到卫星制造的世界。卫星发射后,便会走向失修和过时的终点,这是一个单向旅程,没人能改变它的归宿。故障(在空间领域被称为异常)只能依据数据和推理来远程诊断。软件修复和升级或许可以实现,但大多数机械异常无法被校正。硬件无法更换意味着,即便卫星运行良好,在其通常为15年的寿命周期中,也有可能刚过几年就丧失最佳状态。●这是一大损失。目前,300多颗商业卫星正从距离地球表面约3.6万公里的地球同步轨道上提供电视、无线电、数据传输、天气和电话信号。几十个政府卫星也在那里。每颗卫星需花费数亿美元建造和发射。如果政府和私营公司可以主动修复和改装其在地球同步轨道中的卫星,并根据需要将它们移动到新的轨道,就可以拓宽资金的流向,并将建造和发射替换卫星的花费大大延期。
可以肯定的是,人们已经可以实现这样的“维修服务”工作了。过去,宇航员们需要捕获轨道卫星以进行操作——例如通过一系列航天飞行任务来修理和升级哈勃太空望远镜。但这些行动只在距离地球几千公里的低地球轨道上执行,并且每个任务都可能使宇航员命悬一线。将人类送到地球同步轨道会面临更大的风险,因为他们将遭受来自太阳粒子和宇宙射线的更强烈的辐射。
总之,如果我们希望使卫星修复任务经济、安全,又符合常规,我们就不得不求助于机器人,即建造装有精巧机械臂的航天器,并使它们可以自己执行一系列精细的操作。
构建这种卫星维修机器人的想法已是老生常谈,而目前这个想法终于有望实现了。我们现在正在执行一个由美国国防部高级研究计划局(DARPA)发起的项目,开发一种服务于航天器的机器人,用于维修那些设计时不曾考虑后续维修的卫星,目前这些卫星几乎全部在轨。这种公私合作关系——地球同步卫星机器人维修(RSGS)计划——的基础是美国国防部高级研究计划局(本文作者Roesler在此工作)和美国海军研究实验室(本文作者Jaffe和Henshaw在此工作)近10年的工作以及世界各地的大学研究人员和空间机构的努力。
当地球同步卫星机器人维修计划在2020年左右启动时,我们将能够与卫星所有者合作,将地球同步轨道卫星移动到新轨道,修复被卡住的太阳能电池板,并执行其他几个重要任务。NASA计划在约同一时间独立启动一个名为Restore-L的机器人任务,目的是为一颗政府所有的低轨卫星补充燃料和重置轨道。
如果取得成功,这两个任务将超越太空中自动化和机器人操作的极限。这可能是空间建设项目的第一步,例如可以将能量反射回地球的巨型太阳能阵列、能够搜寻小行星和引开那些对地球构成危险的小行星的机器人,以及能彻底改变我们翱翔宇宙的方式、取得颠覆性成果的其他应用。
●●●
空间机器人维修的发展面临一个经典的鸡和蛋的问题:卫星原本的设计并没考虑对其进行后续维护,因为没有与之配合的空间维修机器人;但那时也没有人会建造空间维修机器人,因为没有需要进行维护的卫星。
这种情况持续了几十年,主要原因是使用机器人来维护卫星的确是个难题。卫星建造时重量要尽可能轻,以降低发射成本。此外,系统被紧密集成在一起也是出于相同的原因。即使在工厂中,要打开一个组装完成的航天器更换一个部件也并非易事。
即便在卫星上进行最基本的操作,机器人维修车也需要面对极端条件,并操纵非常昂贵且易碎的装置。其中包括高强度的辐射、变化剧烈的温度和光照,以及使远程控制复杂度急剧升高的时间延迟问题。难上加难的是,机器人稍有疏忽地轻触就能使物体在这种无引力、无摩擦的环境中旋转着飞走。
为了操作成功,机器人维修工的电子和机械系统必须要准确无误地运行,因为计算机死机或电机故障都可能会损坏需要修复的卫星。机器人必须有足够的机载智能,以便知道如何避免无意中用手臂打到自己或撞到航天器。必须精确地控制机械臂的位置及其施加的力度。最重要的是,机器人维修工应能理解任务在何种状况下进展顺利,什么时候不顺利,以及应该做出什么样的反应。
即使在地球上的实验室里,这些标准也极具挑战性,但机器人专家已经取得了巨大进步,正在向满足这些标准前进。首次空间示范是在20世纪90年代末,日本飞行实验室完成了一个被称为工程测试卫星VII(ETS-VII)的实验。2007年,美国进行了更加雄心勃勃的在轨实验,即美国国防部高级研究计划局的轨道快车(OrbitalExpress)计划。工程测试卫星VII实验表明,维修机器人可以自主地与另一颗卫星会合并对接。此外,轨道快车计划还展示了燃料和组件传递。但是工程测试卫星VII实验和轨道快车计划都没有解决鸡和蛋的问题。这两项任务都发射了两个航天器——维修车和客户端卫星——每个客户端的设计都与维修机器人的硬件匹配。
这两次示范任务颇具效果,但还不足以说服卫星制造商改变设计,使卫星与机器人服务兼容(当然,现有卫星是没法参与改变的)。于是,在2002年,美国国防部高级研究计划局着手应对另外一个问题:对于我们如今这些不兼容维修机器人的卫星,它们有什么用处?为了协助找到答案,该机构赞助了位于美国加州帕萨迪纳的NASA喷气推进实验室,以及美国海军研究实验室(位于华盛顿)下属的海军中心空间技术站(NCST)的研究,海军中心空间技术站是美国最早从事卫星设计和测试的机构,并将该工作持续至今。
一项名为“营救卫星”(RescueSat)的研究考虑了一种较为普遍的情况,也就是火箭或电机故障导致卫星在太空中未能到达预定轨道。营救卫星研究项目表明,机器人维修至少可以解决一个问题:抓住卫星的过程,或者说是“锚固”过程中的问题。每颗卫星都有一个与助推器相连的装置。发射后不久,助推器与卫星分离。分离后,卫星会留下一些外露的坚固大铝环和螺栓孔,维修机器人的机械臂可以轻而易举地抓住它们。这样,机器人可以使两个独立移动的卫星形成一个精确的双卫星集,在维护期间保持稳定。
如果维修机器人利用暴露在外的助推器附件抓住卫星,就应该能够推动卫星,使其移动到新的轨道。但这种未经确证的说法还不足以说服卫星所有者允许维修车接近他们的航天器。因此,营救卫星项目随后又进行了另一项名为通用轨道修正航天器(SUMO)的研究,用真正的硬件(包括一对市售机械臂)测试该方法。这次试验利用了在海军中心空间技术站新建的设施。在设施内,计算机控制的起重系统可以像在轨道中一样移动测试卫星。该系统使工程师得以用真实的轨道运行力学模拟会合操作,通过推进器加速或减速也可以把航天器推入新的轨道。
通用轨道修正航天器测试的侧重点是自主性,这可能是机器人维修面临的最大技术挑战。由于数据处理延迟,来自地球同步轨道卫星的图片可能需要几秒钟才能到达地面,指令也需要相同的时间才能传回卫星。这种延迟使远程操作相当困难,甚至是危险的。因此在某些时候,例如在维修车接近卫星的最后几米内,维修车应可以控制自己——如果有什么看起来不对劲,维修车应能够中止行动。
到2005年,通用轨道修正航天器的研究表明,使用自动化软件的维修机器人有望安全可靠地接近和抓住另一颗卫星。这是一个很好的概念验证项目。但要获得更逼真的模拟结果,我们需要测试机械臂的飞行质量,看它是否足够坚固,能否处理两个数吨重的在轨对象的对接。因此,在2005年,美国国防部高级研究计划局选择了曾为NASA“好奇号”探测器构建机械臂的联盟空间系统公司(AllianceSpacesystems,位于加州),令其在“近期能演示验证的前端机器人技术”(FREND,以下简称前端机器人)项目中建造飞行原型。
前端机器人机械臂于2008年构建完成,它通过了硬件在空间飞行所需的严格测试。它使海军中心空间技术站的团队能够在模拟太空的条件下,利用模拟设施进行更真实的试验,测试会合和捕捉的过程。

一个需要模拟和解决的困难因素是照明。卫星的许多部分覆盖有热毯,热毯可以由诸如镀铝聚酯薄膜的材料制成,与制造救援毯的材料相同。在太阳光照射下,一些航天器零件可能会“闪烁反光”。机器视觉技术可用来处理相机图像,但在太空中的高反射、高动态范围条件下实施就相当具有挑战性,光照因素可能导致航天器高估或低估距离。与其试图在软件角度解决这个问题,不如利用激光测距传感器来克服这种影响。
另一个问题是处理能力。空间适用的计算机通常比当前先进的技术水平落后好几代。但是在通用轨道修正航天器和前端机器人项目期间,我们在那些慢得多的CPU上实现了一切机器人所需的自主性,并实施、部署了机器视觉和控制软件,而且可以保证这些较慢的系统安全地协同工作。
你可能几年前已经听说过卫星维修了。在前端机器人项目完成后,DARPA开始了一个名为“凤凰”的计划,该计划旨在研究从“死”卫星收集大型天线的可能性,并通过附接电子和推进模块赋予它们新的生命。这个非常有吸引力的想法将使有效利用“空间垃圾”迈出第一步。但是最终,美国国防部高级研究计划局认为为地球同步轨道中的“活”卫星提供服务,能比整修已经停用的航天器获得更高的收益。尽管如此,凤凰计划开发的工具和技术是可以被用于地球同步卫星机器人维修任务的。该任务的目的是为商业和军事卫星运营商提供广泛的服务,以延长现有卫星的寿命。
●●●
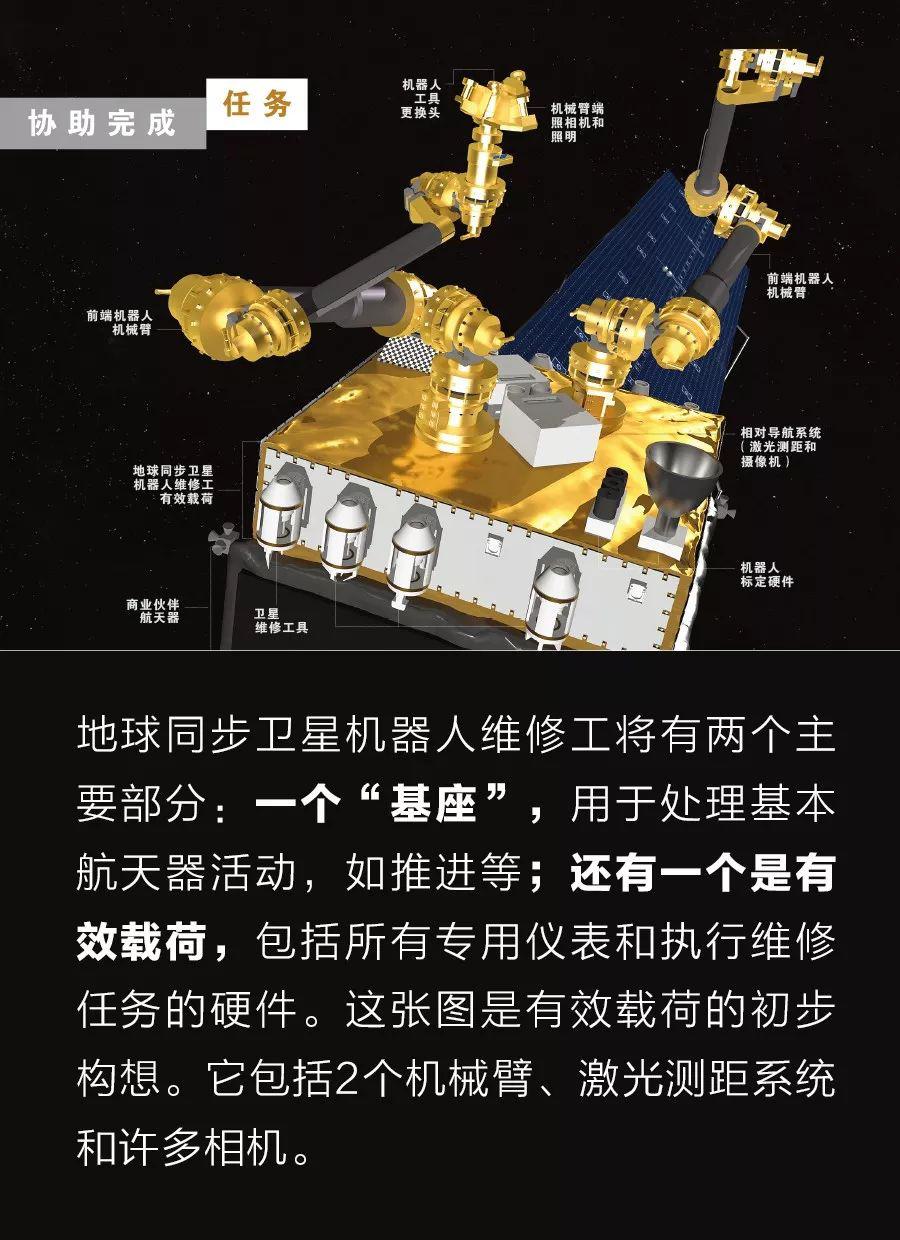
我们将把从之前项目中得到的一切经验都用于地球同步卫星机器人维修计划。一家商业服务提供商将建造航天器“总线”——航天器的基座,它能够提供电力,并处理与地面的通信。美国海军研究实验室将组装和测试其有效载荷。这个有效载荷将包括一个用于远距离瞄准的激光测距系统、十几个摄像机、末端带有许多照相机的两条机械臂、100多个电路板,以及一个机械臂可以调换的工具包(像多头螺丝刀一样)。机械臂(每个重88公斤,长2.3米)是前端机器人技术支持近期示范机械臂的改进版。帕萨迪纳市的前端机器人项目团队现在是麦克唐纳•迪特维利联合有限公司的子公司,为航天飞机和国际空间站建造机械臂。
地球同步卫星机器人维修计划将针对地球同步轨道,由于地球同步轨道接近一个单平面,地球同步卫星机器人维修车将能够在其计划的5~8年的寿命期间访问几十颗卫星。
航天器不能打开那些紧密封装的卫星以换出故障电路板和重置插头。但它可以帮助纠正一些常见的机械问题,例如通过使用其中一个机械臂抓住卫星,用另一个轻轻地调整和“拆开”太阳能电池板或天线。这些附件在发射时合拢在一起,到达太空之后展开。可一旦两三年后有一条天线或太阳能板不能正常展开,一个花费数亿美元的任务也就前功尽弃了。
这些都是精细的操作。天线和太阳能电池板都被设计得尽可能轻,事实上,航天器太阳能电池板组件甚至不足以在重力条件下承受自身的重力。因此,为了确保机器人足够柔和地操纵客户端航天器部件而不损坏它们,我们应用了一种被称为顺应性控制的技术。该技术通过持续测量机械臂所施加的力度,并命令机器人关节做出适当的响应,使机械臂施加的力始终保持在安全余量内。
这种反馈在太空中的重要性不言而喻。巨大的温差变化可以改变机械臂的数十个参数,包括刚度和摩擦系数。在当前设计中,地球同步卫星机器人臂将推动安装在维修车外部的小弹簧,借此在整个任务中对臂力和扭矩传感器进行多次校准。
通用轨道修正航天器的另一项有价值的服务是将客户卫星推到新的轨道,我们正在对此进行探索。如果卫星没有到达预定轨道,这一服务可以将其送到那里,或帮助卫星改变现有的轨道,以节省航天器携带的燃料。地球同步卫星机器人维修计划的重新定位能力也可在卫星生命结束时发挥作用,将停用的卫星移动到地球同步轨道上方约300公里,以确保有用的轨道不会被非运转卫星填满,避免废用卫星与其他卫星碰撞而产生空间碎片。因为维修车可以负责把卫星转移到外部“墓地”轨道,快“死”的卫星就可以利用其最后的燃料进行常规操作来少许延长卫星的寿命。
地球同步卫星机器人维修计划所开发的一个特别令人兴奋的能力是能将新的小型有效载荷附加到操作卫星上。这些模块需要携带自己的电力和通信设备,但它们可以借助卫星的定位和推进能力,以保持处在正确的轨道并指向正确的方向。
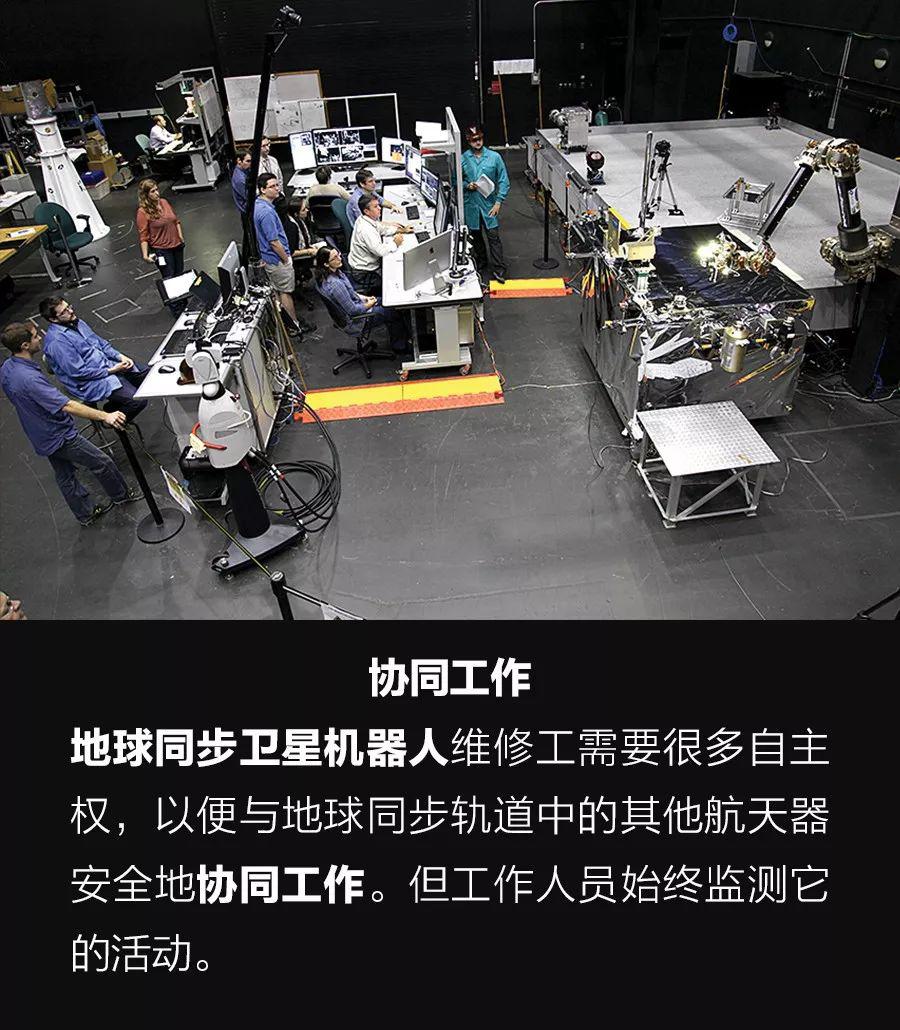
由于通信延迟以及地面操作人员分析航天器的位置和其他因素所需的时间,试图通过遥控来操纵这些活动不切实际,而且存在潜在的危险。因此,我们期望地球同步卫星机器人维修计划将人为和自主操作结合起来,即监督自主。人始终参与和监控地球同步卫星机器人的活动,但是对于诸如抓取等某些关键任务,航天器可针对意外情况独自做出决定,选择执行预先指令规定动作,或是在完全自主模式下操作。
地球同步卫星机器人维修计划的工程师仍在开发这项功能,并希望在未来几年内进行更多的测试。包括开发控制维修车所需的自载软件,预计将会运行大约100万行代码——对航天器来说,这并非前所未见,但绝对超过一般卫星。
●●●
从长期来看,地球同步卫星机器人维修计划和NASA的Restore-L项目正在研发的空间机器人,其能力将大大拓展,不仅限于维护现有卫星。如今,对于单卫星、单发射而言,大量的精力都花费在寻找最大化反射镜和天线尺寸的复杂(有时却不甚可靠)机制方面。但一个灵巧、有能力的空间机器人可以在太空中组装来自多次发射的零部件,以构造天线及其他尺寸巨大的结构。
轨道机器人可以建造更大和更灵敏的无线电天线,来提高雷达成像的灵敏度和通信速度。这可能是地球观测卫星和天文望远镜的福音。
我们甚至可以帮助解决地球上不断增长的能源需求。几乎所有的航天器都通过太阳能电池板获取能量。如果我们可以将太阳能电池板的面积增加到原来的1000倍甚至100万倍,并通过微波将能量传送到地球,我们就可以创造一个清洁、恒定和可在全球传输的新的能量来源(要了解更多,详见本刊2014年5月文章《太空总是阳光普照》)。由于最近太空探索技术公司和蓝色起源公司在回收昂贵的助推器上所取得的成功,以及模块化和大规模生产空间组件的不断发展,这一想法开始看起来更具经济可行性。
在更远的未来,机器人的搭建能力还可以用于创建太空基础设施,例如加油站、太空制造工厂、空间旅游综合体和小行星采矿站。可以移动卫星的此类机器人还可以移除空间碎片,帮助保持地球周围的空间环境安全。有一天,这方面的工作甚至可以让航天器具备移动小行星的能力,以避免其与地球发生碰撞。
要想看到数十台机器人在太空中工作,可能还需要几十年的时间。但在5年内,我们预计将有一些在轨系统能展示出这些更深远的能力所需的自主性、灵巧性和精细度。实现这些愿望需要克服许多技术上和经济上的障碍。但是如果地球同步卫星机器人维修计划能够完成在地球同步轨道上的自主维修任务,它将向卫星所有者传递这样一个信息:一场全新的机器人革命将在遥远的太空发生。
作者:Gordon Roesler,Paul Jaffe,Glen Henshaw
本文仅代表作者个人观点,不代表美国国防部高级研究计划局、美国海军研究实验室或美国国防部。
往期推荐
