
微型智能车的潜在能力就来自于它体积小,耗电少,可以独自执行简单任务,或者组成群体完成更复杂的任务。下面一些可以自主行进、可以爬行、也可以飞行的微型机器人。
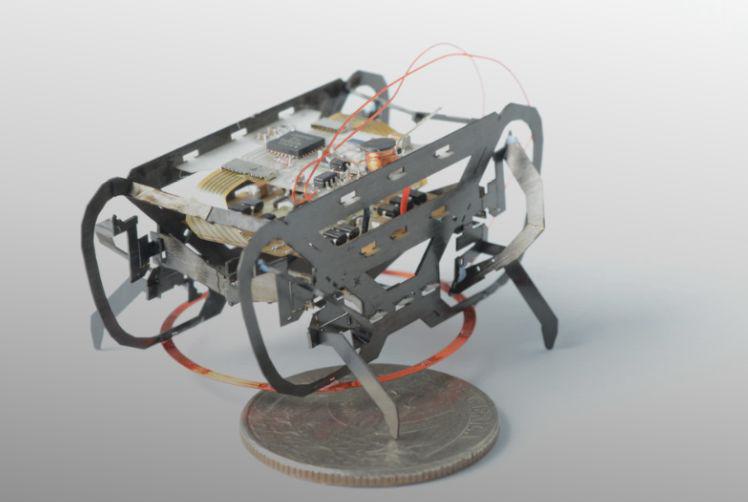
由无线电能驱动的微型爬行机器人
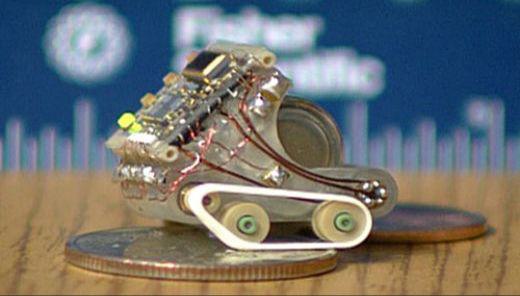
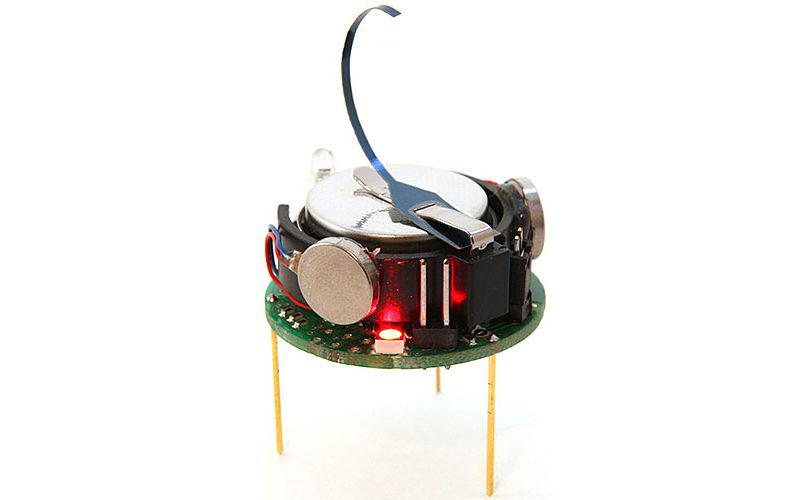
由纽扣电池驱动的由声音导航的机器人
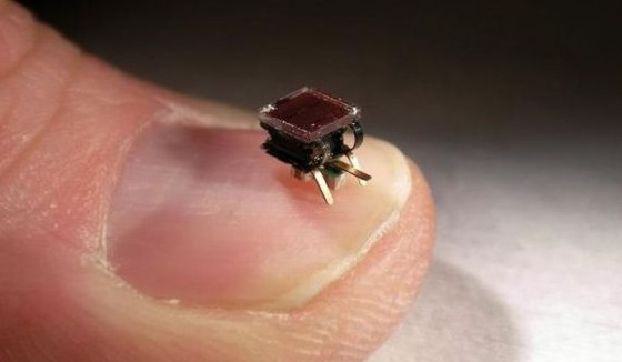
世界上最小的通过抗磁性微操作驱动的可编程机器人
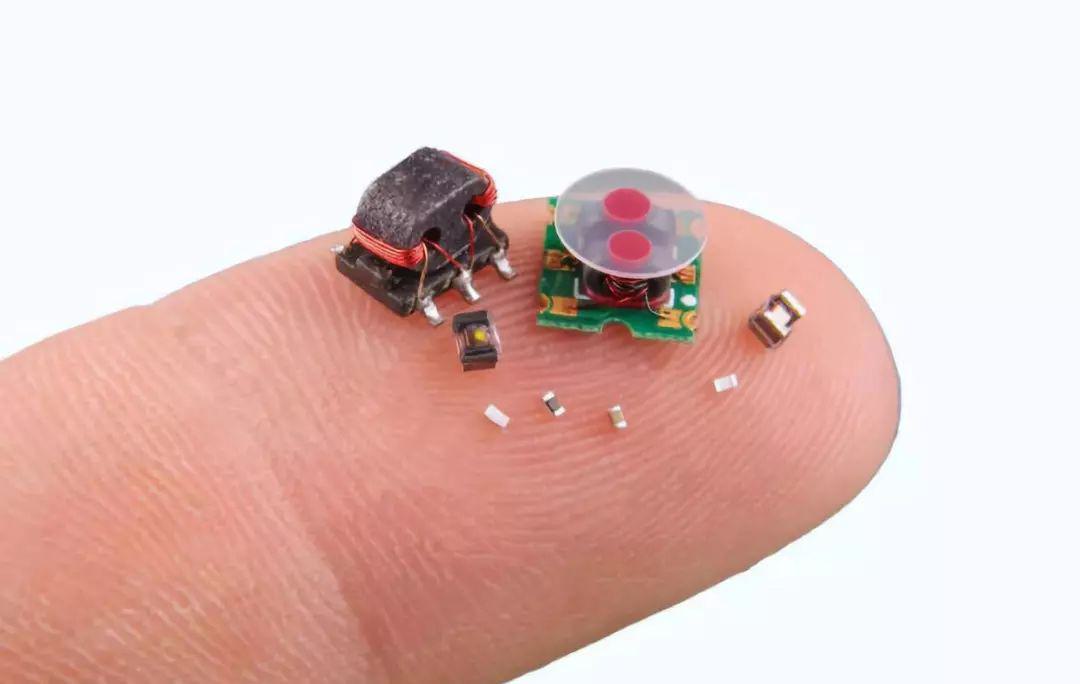
上面最小机器人散件
哈佛大学的Kilobot微型机器人

一百个Kilobots在一起相对 运动
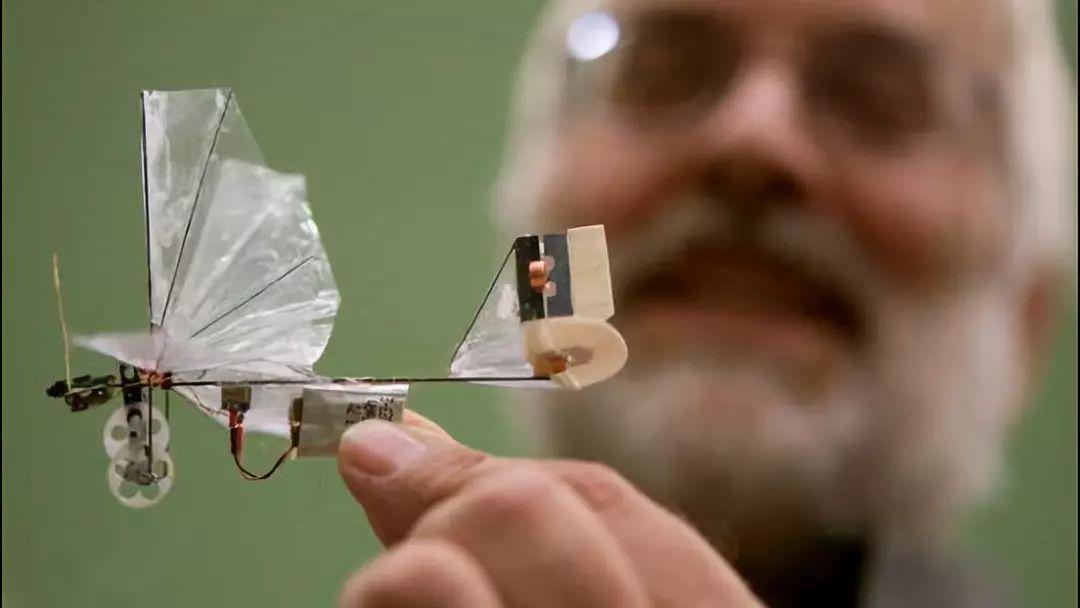
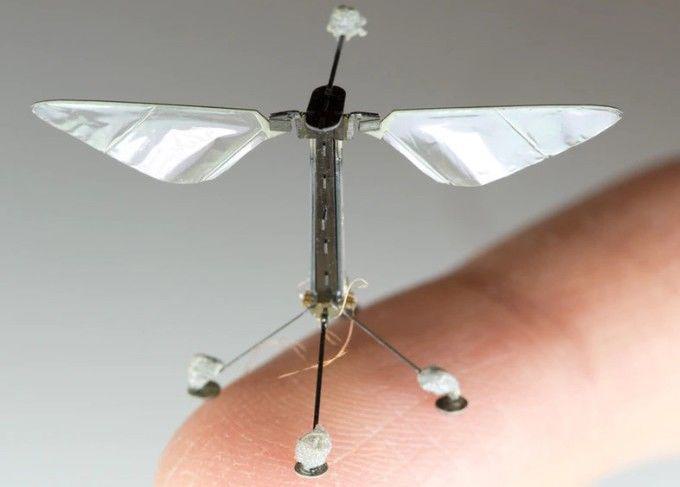
荷兰科学家开发的飞行昆虫机器人
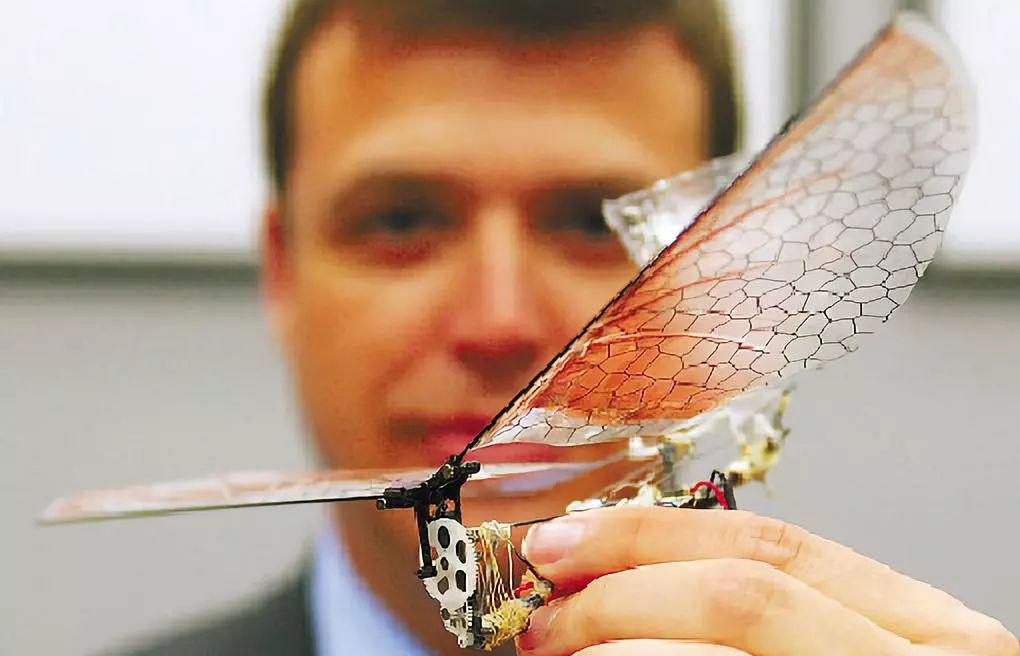
美国军方开发的稍微大一点的飞行机器人
仿生扑翼式可飞行机器人

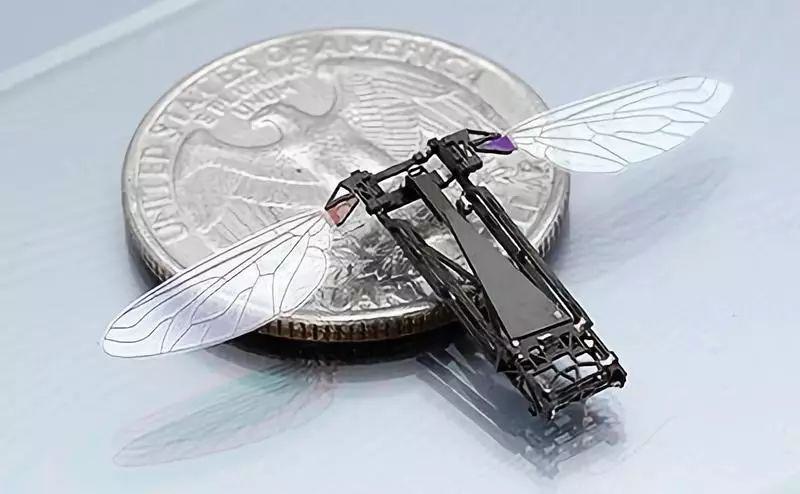
压电陶瓷驱动的扑翼型飞行机器人
通过光电池驱动的飞行机器人
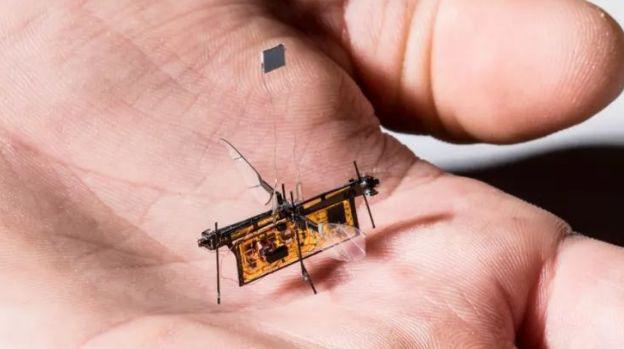
靠激光供电的飞行机器人

扑翼滑翔飞行机器人

美国大黄蜂飞行机器人
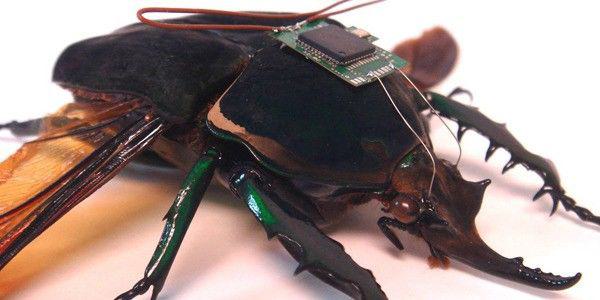
带有电子控制装置的生物机器人(Cyborg)

通过向蟑螂身上接收天线发送刺激信号可以控制蟑螂行进、转向等动作,从而可以使得蟑螂按照规定路线行走。

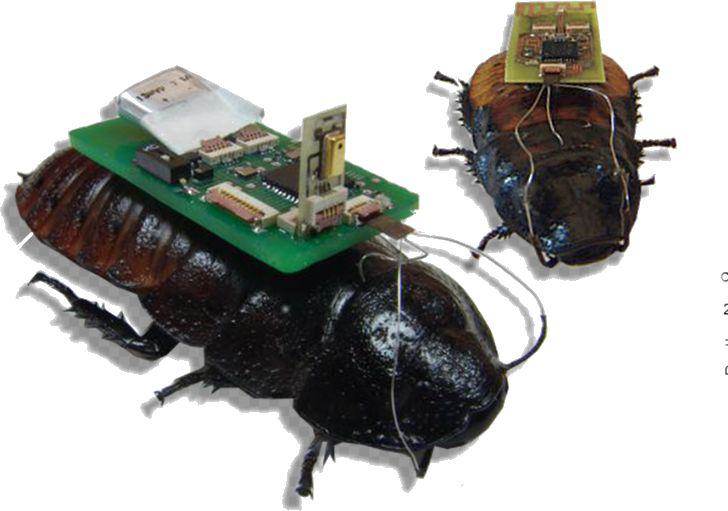
在下面这只蟑螂身上的控制装置按照有三个方向上的麦克风,可以探查声音的方向,近而控制蟑螂朝着声音到达的方向前进。

安装有电子控制电路的蟑螂和飞蛾。它们之间通过接力通信方式可以把检测环境信息传送到数据中心。
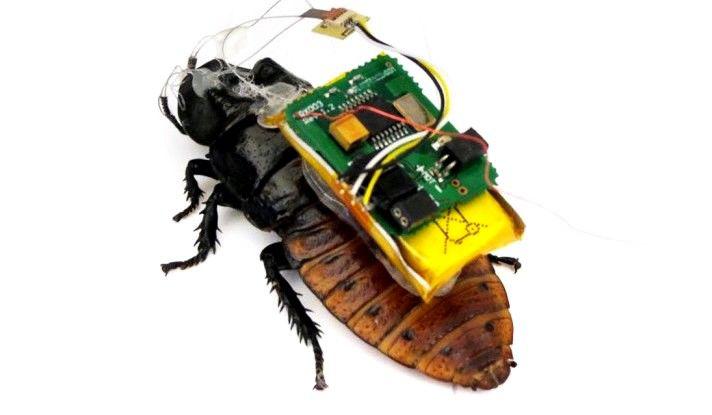
Cyborg-蟑螂
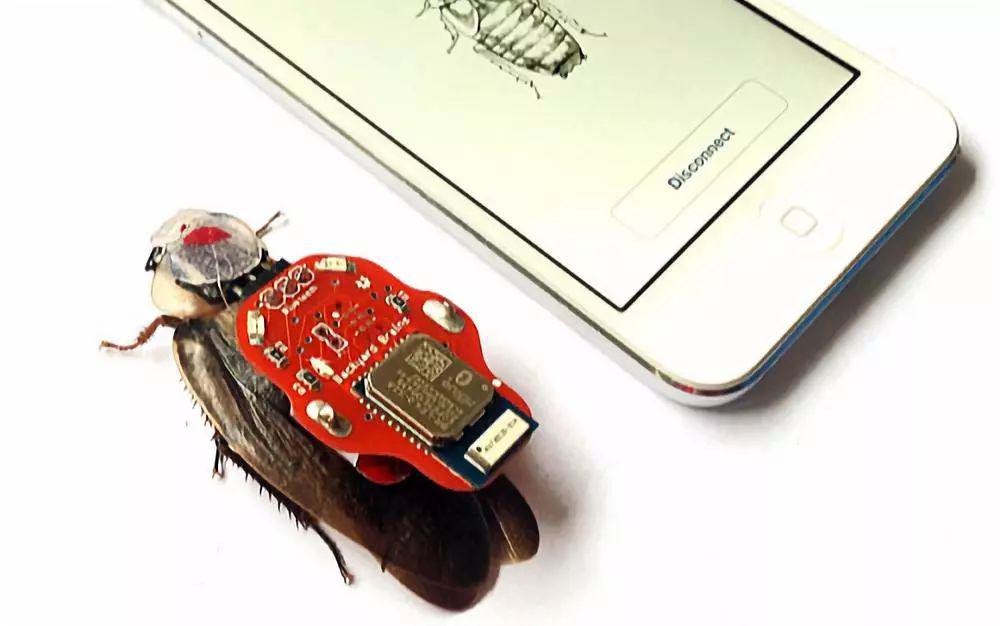
由手机控制的蟑螂

Cyborg 蟑螂

Cyborg 飞蛾
协作的电子蟑螂

被控制的牵牛甲壳虫

一种基于蜻蜓为载体的Cyborg,被称为DragonflEye

蜻蜓身上绑定指甲大小的电子背包里面包含电路板、传感器和太阳能电池,为人类与蜻蜓之间的信息中转站
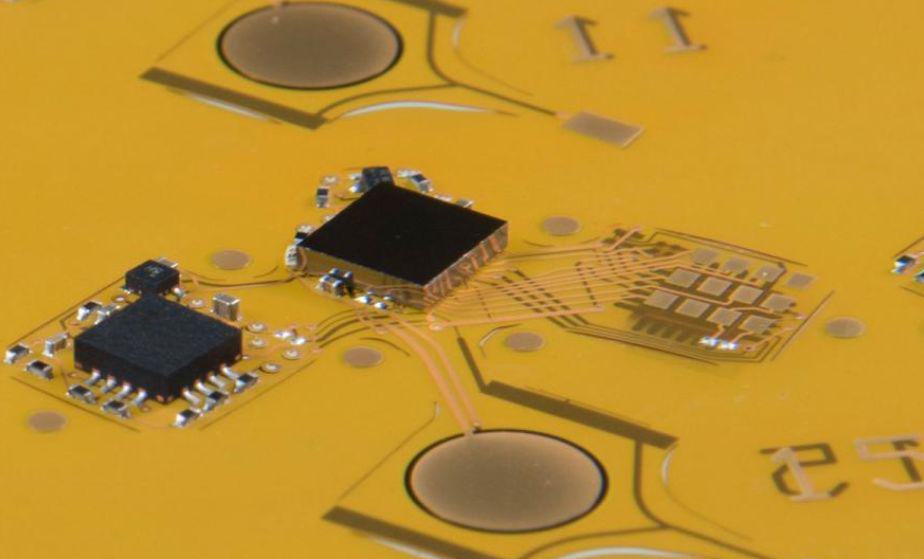
电子背包上的微型电路
选手留言
卓大,您好,我是去年光电创意组的参赛选手。关于今年光电创意组,我有两个小建议。
一是希望可以提高算力。在赛后测试中,因为我们的系统考虑鲁棒性,并未使用纯前瞻算法的l1controller,而是使用了更复杂的路径规划,使得车辆在遇到障碍时可以选择性的停车,倒车等,与此同时也极大的增加算力需求。
在近期测试视觉SLAM算法(基于SGBM或SSD)时,发现在同时运行激光SLAM的PCL 和路径规划之后,图像处理速率非常低下(单目2.9fps,双目2.1fps),完全到不了可以投入使用的量级。而视觉算法对于处理复杂路况有一定的必要性。
另一方面我觉得赛道元素可以引入一些贴近实际路况的元素.我认为作为唯一搭载工控机的组别,也是最接近智能车的组别,算法的鲁棒性与灵活性也相当重要。
比赛时可以看见许多组别在撞到障碍时,车辆就失控了,无法继续运行。我觉得可以加入会在赛道上左右移动的障碍物,这样更贴近实际情况。
听小道消息说,光电创意组想要削减算力,使用nxp im.x系列处理器,比赛选手简化算法,仅仅为了在现有的赛道里跑得更快而调整。我觉得光电创意组,应当让赛道更复杂,提高算力以提高灵活性。
现有光电创意组的ros+pcl(+computer vision)的框架也是相当接近于现在的行业探索的。
不应当一味的去追求跑得更快,追求在复杂路况下跑得更快才更像是“智能车”!
