
AI 电磁组到底有什么优势?
卓大大您好,很抱歉这么晚打扰您,针对电磁组AI的规则,我有几点疑惑和想法想向您请教下:
1、AI电磁规则中允许使用的传感器有红外光电、超声传感器,这两个传感器都是跟测距相关的,但我们使用的赛道中是基础赛道加上圆环,并没有桥、横断这类测距用到的特殊元素,不太清楚这两个传感器对本次比赛有什么帮助 ?
2、AI组中能否转向用神经网络算法,速度控制用传统算法,因为两个网络的话运算量可能会较大 ?
3、您认为神经网络算法与传统PID算法的哪个速度会更快些呢?
我的理解是这样的,如果就实质来说,这两个算法都是建立一个模型,解决同一个寻迹的问题,已知的信息是相同的,两个算法的极限速度应该差不多;就两个模型的求解时间来说,PID算法需要长时间调节才能达到极限速度;神经网络需要采集精确的数据才能达到极限速度,精确的数据得需要一个差不多的PID参数,时间这边来看的话,神经网络算法更优。这些都是我的一些猜想,实际怎样还得需要验证一下。

回复:
规则中允许AI电磁组中的车模使用红外、超声等传感器,如果你认为没有什么帮助,可以忽略它们; AI组允许使用NN控制转向,速度使用传统的PID; 保证车模不冲出赛道的情况下,影响车模最快速度的因素来自于车模执行机构(主要是舵机)的时间延迟和惯性环节。关于这部分详细的分析,请参见公众号里推文“劈-I-D”。 以往电磁车模是依靠超长的电磁检测支架来提高赛道检测的前瞻,来抵消车模转向环节的延迟。今年AI电磁组要求车模上的电磁检测传感器不得超过车模前轮5厘米,这就大大限制车模速度。部署人工神经网络本质上是对赛道信息的存储,它是利用赛道模型信息来提高超前预测,从而提高车模速度。
英飞凌学习板的原理图和PCB板图
卓大大,英飞凌学习板的原理图和pcb什么时候出呀?
回复:相关信息早已在3月18日在Infineon电子生态圈中的智能小车AURIX(TM)信息汇总贴中给出了。

https://www.infineon-autoeco.com/BBS/Detail/62830
Chirp声音文件
卓老师,声音音频文件有录吗?我们想先通过手机播放Chirp音频文件开发相应的算法。
下面给出了Chirp声音波形以及生成PYTHON程序以及百度网盘下载地址:
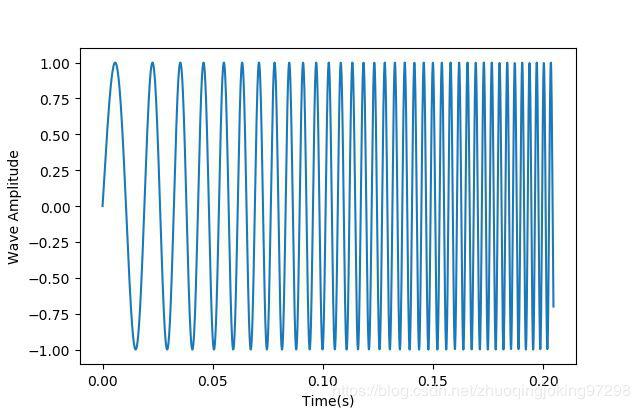
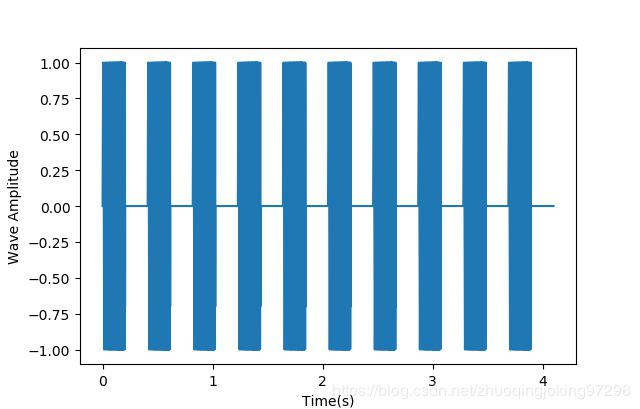
生成Chirp声音文件的PYTHON程序:
#!/usr/local/bin/python
# -*- coding: gbk -*-
#============================================================
# SOUNDWAV.PY -- by Dr. ZhuoQing 2020-03-23
#
# Note:
#============================================================
from headm import *
import wave
#------------------------------------------------------------
data_num = 2048
ts = 1.0e-4
start_freq = 250
end_freq = 2000
sounddata = []
zerodata = []
angle = 0
for i in range(data_num):
sd = int(sin(angle) * 0x6fff + 0x7fff)
sounddata.append(sd)
zerodata.append(0x7fff)
freq = (end_freq - start_freq) * i / data_num + start_freq
angle = freq * ts + angle
#------------------------------------------------------------
segnum = 10
wavedata = []
for i in range(segnum):
wavedata.extend(sounddata)
wavedata.extend(zerodata)
wavelen = len(wavedata)
wavedatabytes = b''
for num in wavedata:
wavedatabytes = wavedatabytes + num.to_bytes(byteorder='little', length=2)
#------------------------------------------------------------
wavefile = wave.open(r'd:\temp\chirp.wav', 'wb')
wavefile.setparams((1, 2, 10000, wavelen, 'NONE', 'Tsinghua'))
wavefile.writeframes(wavedatabytes)
wavefile.close()
#------------------------------------------------------------
timedata = linspace(0, wavelen * ts, wavelen, endpoint=False)
plt.plot(timedata, wavedata)
plt.xlabel('Time(s)')
plt.ylabel('Wave Amplitude')
plt.savefig(r'd:\temp\1.jpg')
plt.show()
#------------------------------------------------------------
# END OF FILE : SOUNDWAV.PY
#============================================================
下载音频文件的百度网盘:链接: https://pan.baidu.com/s/1nmz52lto7WQ2L4odqC0bUQ 提取码: hhm6

人生第一次焊接QFP
卓大大,我想哭,人生第一次焊接QPF封装,第一次使用英飞凌单片机,奈何仿真器监测不到单片机,求安慰/::<

回复:第一次焊接QFP芯片,从焊接角度来看,是非常成功的。当然,仿真器检测不到单片机的原因很多,包括MCU的外部辅助元器件,仿真器连接线的情况,以及工作电源等等。如果你手边有多块电路板,特别是有能够可靠工作的电路板,可以采用对比的方法来检查问题所在。
受到限制的学校
卓老师您好,我是国防科技大学智能车实验室领队,今天英飞凌官方打电话说我们学校学生用不了英飞凌芯片,让我们继续用nxp 咱们学校双车组和信标组是否可以继续使用nxp芯片?
回复:1,针对来申请的相关队伍,英飞凌给他们回复邮件,说明由于受到政府的贸易技术管制,英飞凌无法给他们提供样片和技术支持,为了不影响同学们参加比赛,英飞凌与组委会进行协商后,组委会特别批准这些学校的信标组和双车组可以不采用英飞凌的芯片,而使用STC或NXP的芯片完成比赛。
2, 对于这些院校的指导老师,组委会帮忙单独通知一下,请他们了解情况,并告知相关组别的同学们。
3,若相关组别的同学们来向组委会咨询求证,留言给卓老师的微信公众号,需要辛苦卓老师在后台进行答复,而不明示公之于众。
4,如有其他学校的同学们对此表示质疑,建议组委会这边回复:对于信标和双车组,MCU方面不管是用英飞凌、NXP或者STC,都能很好地完成比赛,对车辆的性能没有太大影响。而考虑到大赛未来的长期发展,MCU也将朝着越来越开放的趋势发展,同学们应该做好准备,学习不同的MCU,拓展自己的知识和视野

机器学习创意组别
卓老师,请问现在确定创意组室外光电或者那个新组的有无问题了嘛 ;我们这边等下去是个食物链,我们选完还得给学弟们留时间选(上次反悔已经和学弟关系弄得有点不愉快了)理解您的难处,不过昨天看到钢铁侠发视频了,所以问一下。
回复:和百度合作引入智能车竞赛及其深度学习组别相关的正在走最后的确认过程。近期将会公布具体竞赛内容、培训资料以及比赛要求等信息。