
高速巡线机器人
卓大大!这个巡线小车好厉害的,还能飞檐走壁,智能车啥时候也这样?

回复:在网站 HBFS Robotics[1] 给出了这种高速巡线机器人的相关技术指标,值得大家借鉴。
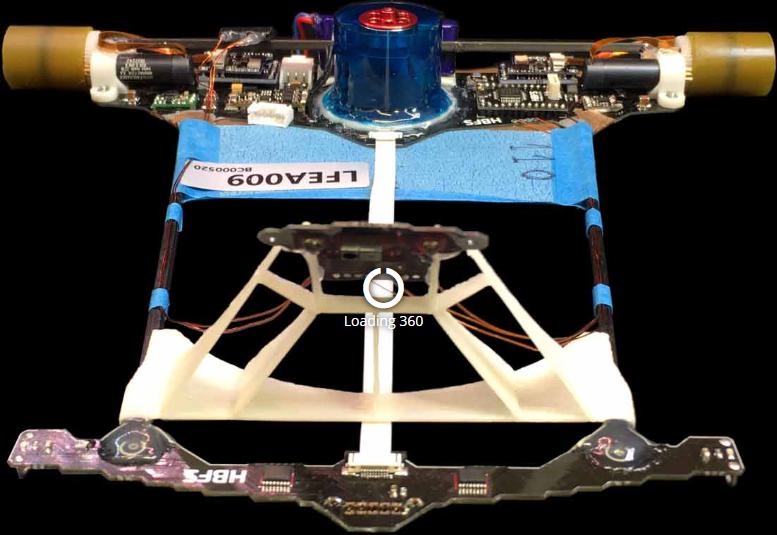
高速可靠数据获取在车模前面的传感器条上安装有16个红外反射式传感器,可以连续测量赛道表面的反射率。通过自动多路模拟开关将每个红外传感器输出的模拟信号分时传递给单片机进行采集。
由于采用了模拟多路开关,减少了前端传感器连接到后面控制器之间的引线数量。前端传感器的间距不是固定长度的,中间密集,旁边稀疏,这样可以在保证测量范围的情况下,提高中间位置的检测空间精度。
ARM CortexM4F控制器利用了STM32F303微控制器,带有两路独立的ADC外设,可提供高达5MSPS的信号采集。这样就可以对红外传感器达到10kHz的读取速度。利用片上高速DSP,FPU指令,可以完成高速闭环控制,减少响应时间。
车模上安装有可更换的惯性测量模块 MPU6500 。控制PID算法根据速度进行对巡线机器人能够自适应控制运行位置。
航空级别的直流无刷电机使用了FAULHABER 1028系列的直流无刷电机,它被应用在航空和军事军事领域,可以提供高输出力矩和快速响应时间。结构紧凑,重量轻巧,采用空心杯设计方式,减少了转子惯性。

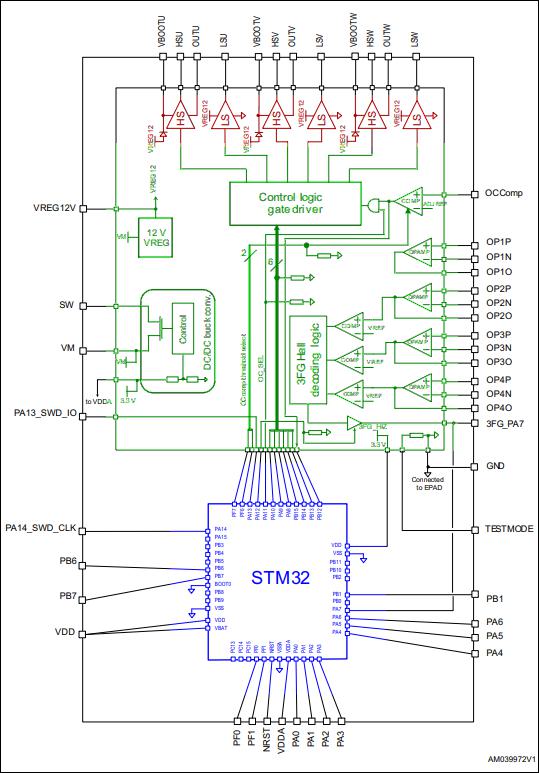
高可靠的电子速度控制直流无刷电机控制与驱动采用了STSPIN32F0微控制器和MOS驱动电路可以持续提供6A电机驱动电流,而整个控制模块大小仅仅有24×16mm大小。
采用了4层PCB布线,提高了芯片散热性能,驱动采用双N沟道MOS管,可以驱动电机速度达到35000RPMs。
轻质高效传动结构
使用了EZO微型滚珠轴承,减少了摩擦阻力,通过3D打印技术,进行优化的机械结构可以在保持传动机构的刚度的同时减少了重量。
定制轮毂和轮胎混合聚氨酯(Polyurethane)与树脂材料制作的车轮轮胎,在提供更大的牵引力的同时有减少了摩擦阻力。特别是在高速运转的情况下性能更高。轮胎的配方也对减少磨损进行了优化。
高速光电感知系统采用了功率为7W的OSRAM的大功率红外LED,对路面扫描速率为250帧每秒。这种超亮LED可以将环境光线的干扰消除,并可以检测前方1米范围内的路面物体,在前方10厘米之外对引导线提供30×30像素分辨率的检测精度。
AI电磁车模前瞻
卓大大,之前ai电磁组推文里ai车的图片前瞻都超5cm了。比如下面这两幅图,我怕比赛有队伍直接照着这个图做车了,会对比赛的公平有影响。
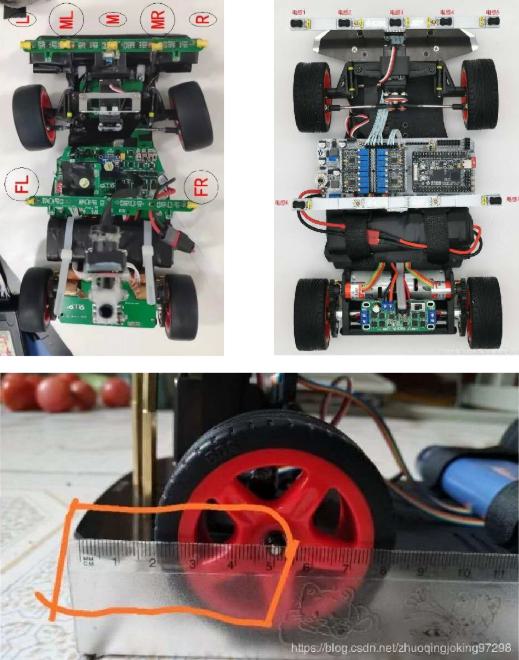
回复:的确,按照规则原意,AI电磁组的前瞻是指前轮中心线距离前面电磁传感器的距离不超过5厘米。这样限制是为了突出数据驱动下的车模控制 优势。在原来推文中给出的插图应该只是示意表示传感器安装的基本方案,但并不满足距离的限制。
AI车模运行情况
卓老师您好!我参加今年电磁AI组,自己写的上位机和单片机都完成了。上位机可以实时观察小车各项参数的波形并一键保存数据,单片机可以一键转换pid和ai模式,还有完整的gui和出轨保护等功能,均已发布到 https://github.com/CSU-iMag 我们非常渴望开源,但苦于无人问津!真心希望智能车能流行开源!
卓大大,我们ai现在一米每秒大概是个什么水平呢?

回复:我现在对于大家的进展了解也不是太多。不过从你的录像中看起来,车模跑的还是不错的。应该还有很大的提升空间。我很好奇,你屋里地板上那些奇怪黑色线迷宫图案是做什么作用的呢?
哈哈哈,是给我妹妹玩的
深度学习创意比赛
卓大大,冒昧问下,就是我看今年官网推送的比赛文档里,没看到如影随形组,只有电磁ai,新发的深度学习创意组是人流检测与红绿灯识别组, 在您的公众号里搜索如影随形,也没搜索到,所以如影随形是取消了吗?
回复:今年的深度学习创意比赛分为两个阶段。第一个阶段就是现在已经开始的线上目标检测与识别的选拔赛,其中内容包括人流检测与红绿灯识别两个赛题组。第二阶段是根据比赛情况免费发送车模平台,开展线下比赛的调试和比赛阶段。比赛内容也包括两个:如影随形和交通场景竞速比赛。
详细规则可以参见公布的规则: 人工智能挑战赛[2] 。
参考资料
HBFS Robotics: https://hbfsrobotics.com/linefollower
[2]人工智能挑战赛: https://mp.weixin.qq.com/s?__biz=MzA5NjQyNjc2NQ&mid=2452229358&idx=1&sn=89ab1bddf1dc5f1e8e04d17f662bbb28&chksm=876ee28cb0196b9a09854aa18afb3f5ba8c0fa188e97bde712af257ae26e8b5a1cd9b7d55158&token=1548791219&lang=zh_CN#rd*