
■ 问题提出
在博文 逆Laplace数值逆变换[1] 给出了数值计算Laplace逆变换的简易程序。其中存在以下几个问题需要讨论:
问题1: 程序实现过程原理以及优化; 问题2: 运算参数:,,对于积分数值的影响。从上篇博文中明显看到有些计算出的结果大大偏离的实际值。比如其中的函数所计算出来的幅值超过了1.

01程序实现原理以及优化
1.Laplace逆运算
所以,算法的核心是对进行傅里叶反变换,然后在乘以。
由于确认变换后的函数是实函数,因此,为了节省计算时间,只对傅里叶反变换的积分,进行正半轴的积分,同时积分的上限由参数决定。对积分的数值取齐实部,再乘以2便可以得到。

2.Python积分程序实现优化
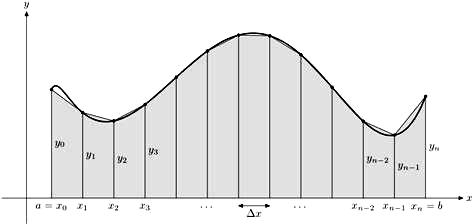
使用梯形积分来实现函数的积分,可以获得更精确的积分值。理论分析可知:

其中 以及 。那么积分误差上限为:

其中,, 。
计算可以有两种方式:
方式1: 对左、右黎曼积分加权平均:

方式2: 利用如下的公式计算:

最后实现的代码为:
def trapz(f, a, b, N=50):x = linspace(a, b, N+1)y = f(x)y_right = y[1:]y_left = y[:-1]dx = (b-a) / NT = dx/2 * sum(y_right + y_left)return T
利用上述公式,对进行积分测试:
printf(trapz(sin, 0, pi/2, 1000))所得到结果为:0.9999997943832332。可以看到使用n=1000对应的结果后面的积分精度达到了小数点后面6位9的小数点的位数。
3.实现Laplace逆运算
通过上面梯形积分方法,实现Laplace数值逆变换,具体的子程序如下面所示。
#------------------------------------------------------------def invlt(t, fs, sigma, omiga, nint):omigadim = linspace(0, omiga, nint+1, endpoint=True)y = [(exp(1j*o*t) * fs(sigma+1j*o)).real for o in omigadim]y_left = y[:-1]y_right = y[0:]T = sum(y_right + y_left) * omiga/nintreturn exp(sigma*t) * T/ pi / 2#------------------------------------------------------------def fs(s):return 1/(s*s+1)#------------------------------------------------------------sigma = 0.2omiga=200nint=omiga*50tdim = linspace(0, 2*pi* 3, 200)ft = [invlt(t, fs, sigma, omiga, nint) for t in tdim]
02一些基本函数的实验
下面通过对一些基本常见函数的laplace变换,来测试一下上述程序的性能。
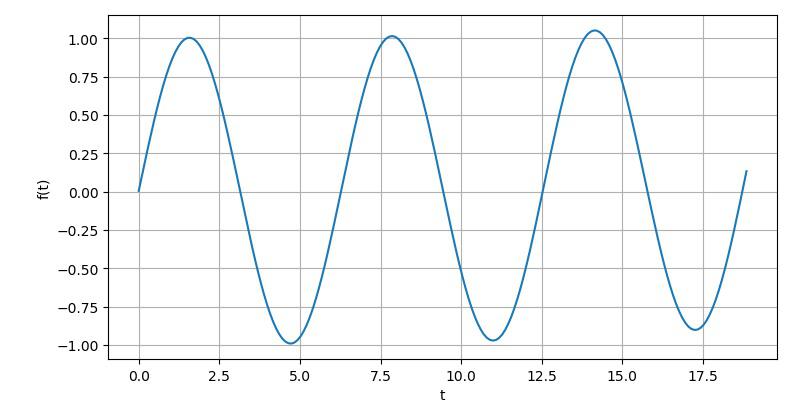
Ⅰ.sin(t)

sigma=0.2, omiga=200, nint=omiga*50
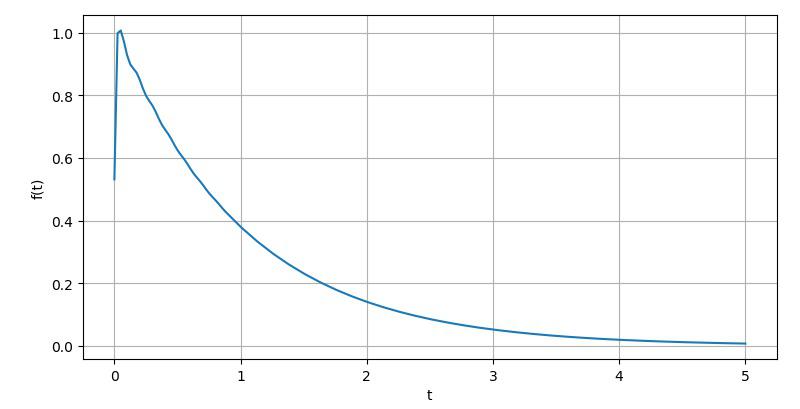
Ⅱ.exp(-t)

sigam=-1+0.1, omiga=200, nint=omiga*50
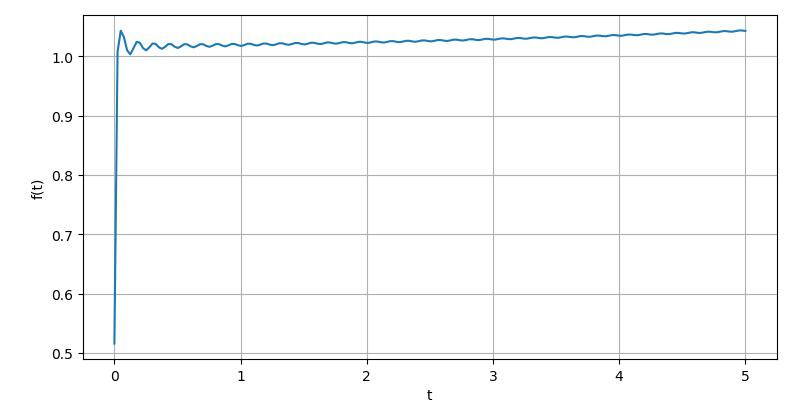
Ⅲ.u(t)

Ⅳ.u(t-1)


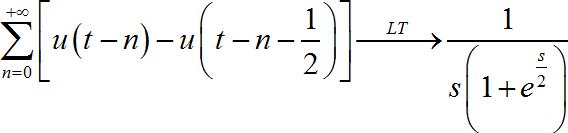
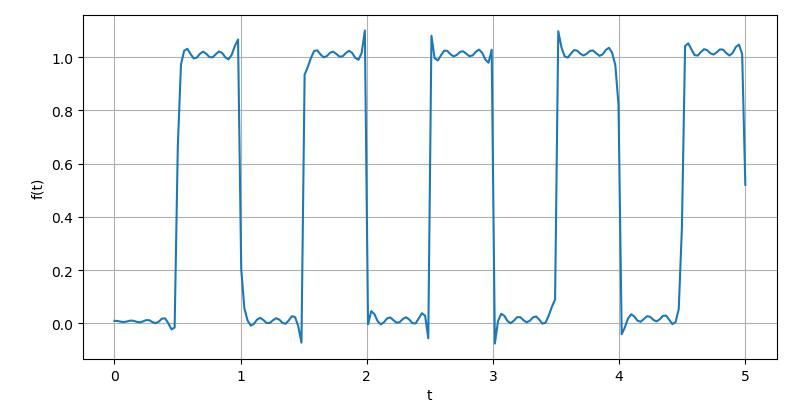
Ⅴ.周期化脉冲信号
※ 结论
通过原理分析,可以获得建议的Laplace数值逆运算的正确的PYTHON算法程序。
这个程序是直接对Laplace反变换公式利用梯形积分方法获得计算结果。通过对几种常见的信号Laplace的反变换,验证了这个算法的正确性。
通过在此过程,可以看到,对于参数sigma, omiga, nint对于计算结果还是有很大的影响。另外,对于时间t,只能在比较小的范围内有效,当t超过一定长度,前面所计算的结果都会出现比较大的误差。
参考资料
逆Laplace数值逆变换: https://zhuoqing.blog.csdn.net/article/details/107241738
公众号留言
卓大大,请问AI电磁组不进圆环会加时间吗?规则上写不要求进圆环,但圆环进比不进的时间更长一些,那这个赛道元素的意义是什么?之前记得您有过类似回答,但是找不到了谢谢您~
回复:这主要是为了使得AI电磁组能够在普通的赛道上完成比赛,而不必对赛道进行改造。同时,圆环的存在也会对AI电磁组在数据训练是产生影响。
卓老师好,关于AI电磁组的有个情况需要向您反映一下,规则中规定车模运行方向不限,这里有个bug,如果车倒着跑,电感依然只距离后轮轴心往前5cm,这样安装是符合目前公布的规则的,但因为舵机在后,也就是转向机构在后,相当于获得了25cm+的物理前瞻,这样通过传统电磁寻迹的方法也能轻松获得不错的速度,我想这里应该是一个BUG。
现在因为时间紧,不少同学都想用传统方法来钻空子,同时因为今年没有全国统一场地的国赛,还有云比赛的存在,对参赛车模具体采用了什么方法也不利于检查,需要更多的人力,,所以我认为应该限制运行方向,不能倒着跑,从一定程度上可以打消部分人钻空子的念头,此建议仅供卓老师参考。
回复:谢谢你的建议。关于这方面,我们将会给出竞赛规则补充说明,限制车模只能往前行。